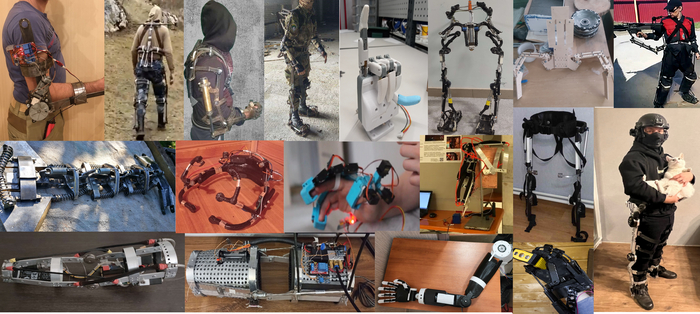
Где то месяц назад мы начали свой конкурс бионических проектов и конкурс начался очень хорошо! Участников уже довольно много и хотелось бы немного рассказать о их проектах и заделах на проекты. Первая часть
И следующий участник нашего конкурса - первый российский рипер Артём Соколов
Все предыдущие проекты были экзоскелетные, но это не совсем профиль Артем. Профиль Артема импланты и он решил пойти дальше. Его следующий проект это имплант с облачным хранилищем. То есть по сути флэшка с датчиками, соединенная с интернетом, и всё это под кожей. Задел у Артема уже мягко говоря огромный (задел) и поэтому идея более чем реализуемая.
Кроме того возможно будет добавлена возможность снятия пульса и кислорода в крови.
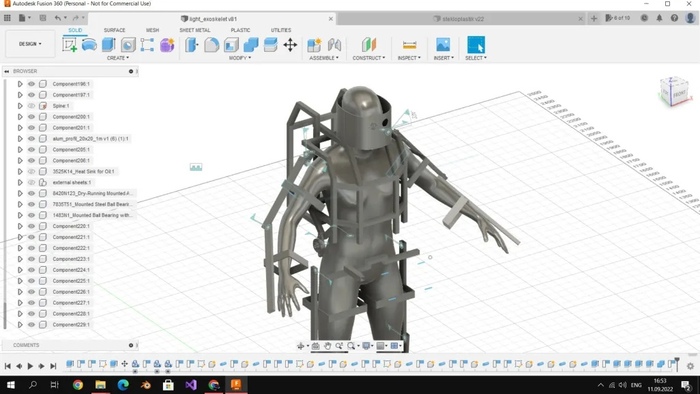
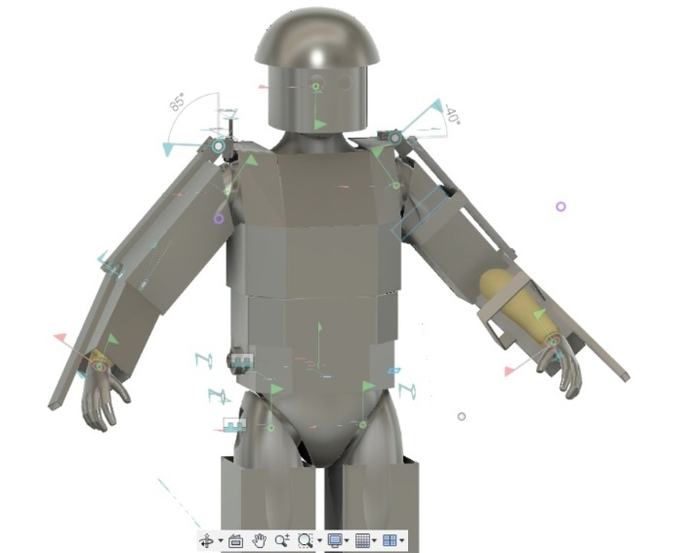
Иван разрабатывает свою собственную концепцию экзоскелетов и собирает уже прототип. Экзоскелет будет называться СЗК (Силовой Защитный Костюм; англ. PPS - Powered Protective Suit). Главной отличительной особенностью является собственная философия проектирования и разработки, что привело к использованию ряда нестандартных решений, примененных в конструкции, а также обуславливающая саму суть данной разработки. Помимо этого был произведен отказ от стандартной каркасной конфигурации в пользу конфигурации несущего кузова, что уменьшило объем и общие габариты, улучшило подвижность отдельных элементов (например уменьшило место занимаемое под руками), но значительно увеличило вес и толщину металла.
СЗК представляет из себя костюм защищающий человека от большинства распространенных внешних угроз окружающей среды (будь то дикая природа или производственный цех) и значительно усиливающий человека при помощи системы приводов.
Следующий участник нашего конкурса - Инал Кудаев Инал решил пойти по иному пути. Экзоскелет состоит из нарезанных компонентов. На фото готовый макет из фанеры, но в чем плюс этой все идеи с нарезкой - скелет можно нарезать буквально из чего угодно, как только будет отработаны чертежи и узлы. Первые макеты из фанеры готовы и сейчас уже переход к стали.
Экзоскелет значительнее сложнее моего и имеет много мелких узлов. Будет он работать на пневматике, но сначала будет отработана основная кинематика на пассивном прототипе. Если у Инала получится то будет сразу готовый почти что производственный образец!
Для тех кто хочет участвовать: Просто пишем в группу или телегу в коменты .Ну или лучше в дискорд. Правила в начале Для тех кто хочет поддержать конкурс : Весь конкурс будет финансироваться добровольными взносами через вот эти платформы. -------------------------------------— https://yoomoney.ru/to/4100118691732638 https://vk.com/donut/exomech https://boosty.to/exomech Эти платформы привязаны к карте сбера на которую можно так же переводить 2202 2080 5273 7732 --------------------------------------— Информационные каналы: https://vk.com/exomech
Где то месяц назад мы начали свой конкурс бионических проектов и конкурс начался очень хорошо! Участников уже довольно много и хотелось бы немного рассказать о их проектах и заделах на проекты.
Иван сделал по настоящему огромную работу. Его экзоскелет мало того что на мощных и очень классных сервоприводах, так ещё и сам каркас полностью фрезерованный. Каркас экзоскелета из алюминия. На данный момент экзоскелет Ивана в процессе доделки.
Второй участник - Artem Manafov Экзоскелета Артёма пневматический и уже почти на финишной прямой! В качестве приводов будут пневматические поршни, а корпус сделан из комбинации печатных элементов и металла. Осталось тут только силовую часть приделать, да электронику стабилизировать.
На данный момент экзоскелет Артема в процессе доделки и добавления спины.
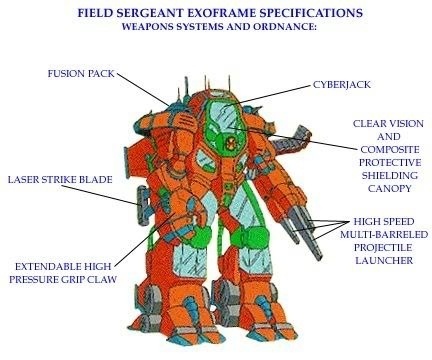
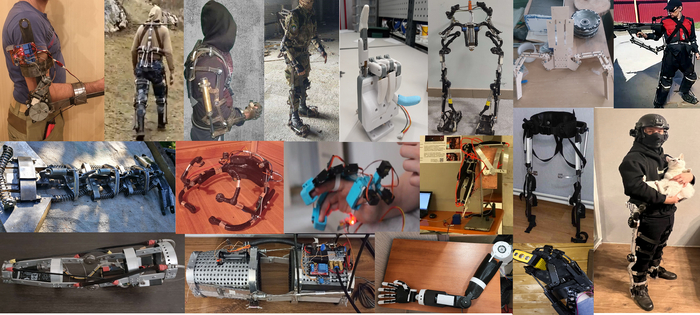
- В моем школьном детстве был замечательный мультсериал, который поселил во мне любовь к экзоскелетам. А так как первая половина детства у мальчика прошла, то надо отдавать дань детским мечтам... Для участия в Конкурсе соберу что-то из того, что есть на картинках. Будет ли это максимально точное построение конкретной модели или моя авторская солянка из всего, пока не знаю. Можете повлиять на моё решение - комментируйте, предлагайте
У Олега довольно серьезный задел под работы! Это экзоскелет- усилитель рук работающий на моторах.
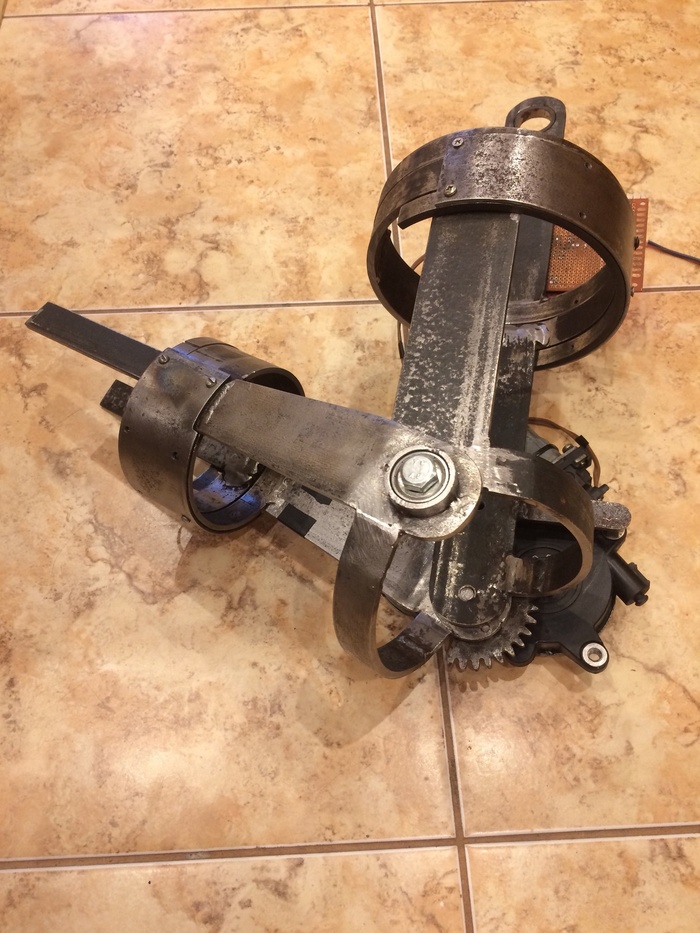
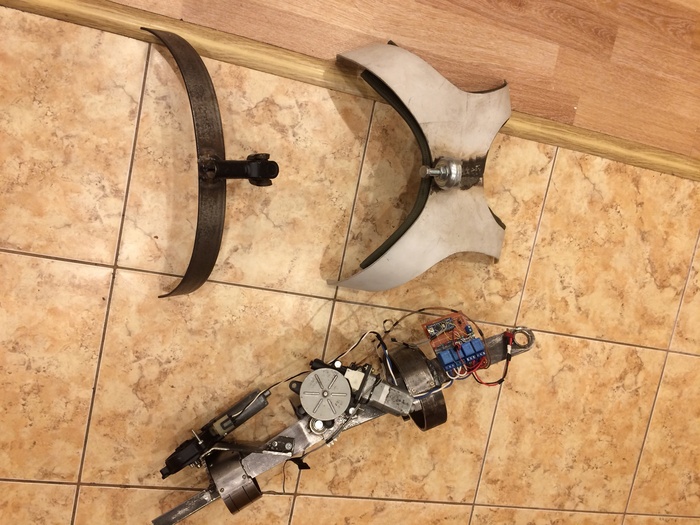
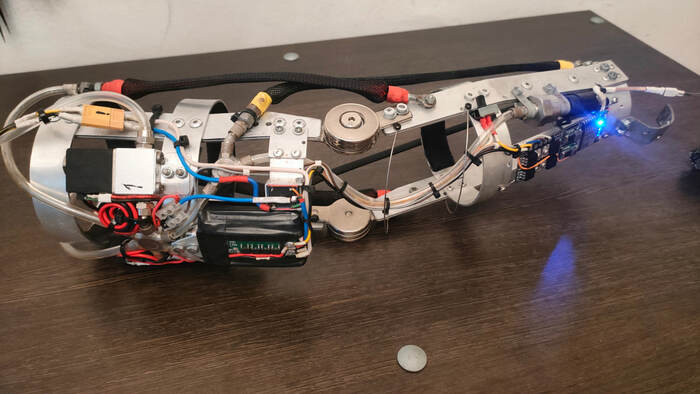
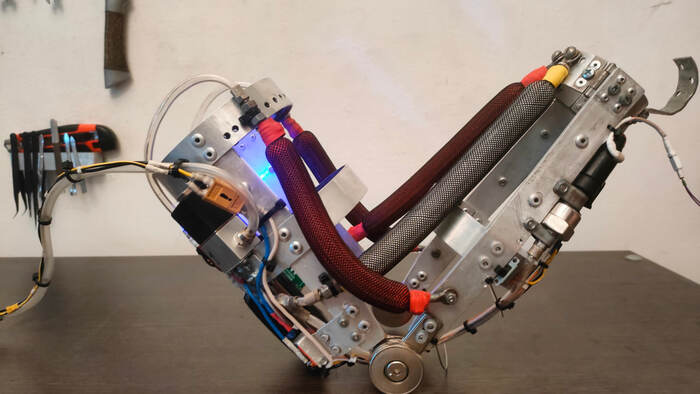
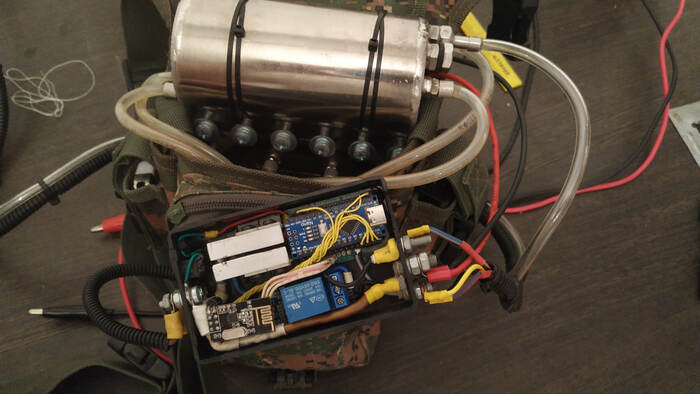
И четвертый участник нашего конкурса - Сергей Жуков Сергей пока ещё не начал свой конкурсный проект, но поделился огромным количеством чертежей и материала от предыдущего. Предыдущий проект Сергея это очень хорошо выглядящий экзоскелет руки. Сделан он из алюминия, а в качестве приводов стоят пневмомускулы. В добавок Сергей собрал собственный газогенератор в дополнение ко всему этому. Возможно потом будет выложено видео как с этого газогенератора запускаются мускулы (оно уже есть). Очень достойный задел для проекта и следующих работ.
Для тех кто хочет участвовать: Просто пишем в группу или телегу в коменты .Ну или лучше в дискорд. Правила в начале Для тех кто хочет поддержать конкурс : Весь конкурс будет финансироваться добровольными взносами через вот эти платформы. -------------------------------------— https://yoomoney.ru/to/4100118691732638 https://vk.com/donut/exomech https://boosty.to/exomech Эти платформы привязаны к карте сбера на которую можно так же переводить 2202 2080 5273 7732 --------------------------------------— Информационные каналы: https://vk.com/exomech
Количество людей которые занимаются проектами напрямую связанными с бионикой растет и растет. И это прям по настоящему радует! Я вижу что растет и развивается наше сообщество. Оно растет как и количественно так и качественно. Кто то отходит от дел, а кто то приходит, но оно по настоящему живое! Наши товарищи участвую в грантовых конкурсах и побеждают!
Это очень всё мотивирует на дальнейшую работу и я бы хотел предложить вместе попробовать ещё больше укрепить эти небольшие успехи. Мы решили организовать наш собственный конкурс проектов начинающих разработчиков бионических устройств
Я хочу предложить всем участникам сообщества лично поддержать проекты начинающих разработчиков. Так мы сможем ускорить разработку многих проектов т.к. появится соревновательный элемент, вполне конкретный приз и возможность рассказать о своих проектах.
Кроме того призываю начинающих разработчиков так же показать свои проекты и поучаствовать! На время написание поста (25.05.2024 18:56) уже есть 7 участников !
Основные положения конкурса
Цель конкурса - развитие бионики в России через проектную деятельность и популяризация тематики улучшения или восстановления свойств человека (физических и умственных)
Тема конкурса: технические проекты, направленные на усиление/восстановление/расширение физических и умственных возможностей человека:
1.Экзоскелеты (пассивные и активные)
Экзоскелет - это система, состоящая из эргономичного телу каркаса с разнообразными приводами, системы управления и источника энергии. Экзоскелет позволяет дать человеку дополнительную защиту от внешних факторов или может служить дублирующей опорно-двигательной системой.
2.Нейроинтефейсы и проекты связанные с применением нейроинтерфейсов
Нейроинтерфейс (или интерфейс «мозг – компьютер») – это устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умный дом», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.
3.Протезы и импланты
Протезы и импланты — это устройства, которые берут на себя функции утраченных/поврежденных конечностей, или каких-то иных элементов организма.
Правила конкурса
Участник и участие в конкурсе:
Начало конкурса: 01.06.2024. Длительность конкурса - 6 месяцев. Подведение результатов конкурса: 30.12.2024;
Для участия в конкурсе принимаются проекты, связанные с бионикой или же любыми системами/технологиями, улучшающими/восстанавливающими физические или умственные возможности человека;
В конкурсе могут принимать участие граждане РФ в возрасте от 14 лет. Обязательно наличие у участника собственного счета для перевода приза;
Для участия принимаются только проекты начинающих разработчиков или разработчиков, не имеющих более одного завершенного проекта по теме конкурса;
Участник/команда может представить на конкурс только 1 проект;
Участник/команда может заявить о своем участии в течении 4 месяцев конкурса ( до 01.10.2024 );
Участник/команда может заявить об участии в конкурсе на любой стадии проекта, но за 1 день до окончания конкурса проект должен быть на стадии работоспособного прототипа/макета/технологии;
Участник обязан предоставлять фото/видео материалы и информацию о проекте;
Для подачи заявки на участие со своим проектом участнику необходимо написать администратору или в сообщения любого информационного канала сообщества;
При нарушении правил конкурса участник/команда подлежит дисквалификации.
Призовой фонд и призы:
Победитель конкурса определяется открытым голосованием на информационных каналах сообщества;
Призовой фонд пополняется через добровольные денежные или иные материальные пожертвования;
После определения трех победителей призовой фонд распределяется следующим образом: 1-ое место - 60% призового фонда, 2-ое место 30% призового фонда, 3-е место - 10% призового фонда;
Перевод осуществляется на счет, зарегистрированный на имя победителя/победителей;
Организатор обязуется не расходовать призовой фонд на иные задачи, кроме как призовые;
Возможно увеличения количества призовых мест или номинаций при большом количестве участников.
Призовой фонд пополняется через следующие платформы:
В этой статье опишу очень простой, но тем не менее важный и интересный проект - колесное шасси на нейроуправлении. Этим шасси может быть как машинка, так и большой робот на колесах так и инвалидная каталка. Разницы не будет вообще.
В отличии от дрона тут не нужно долго тренировать и порог входа в тему очень низок.
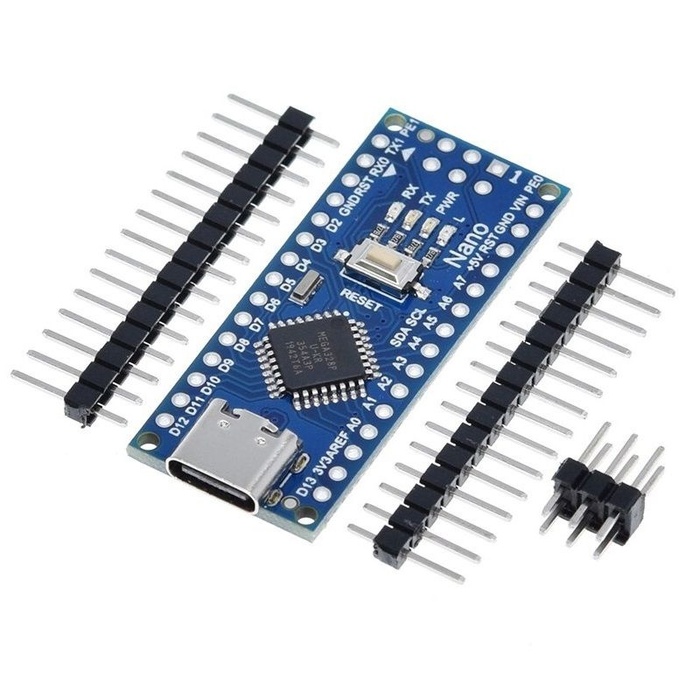
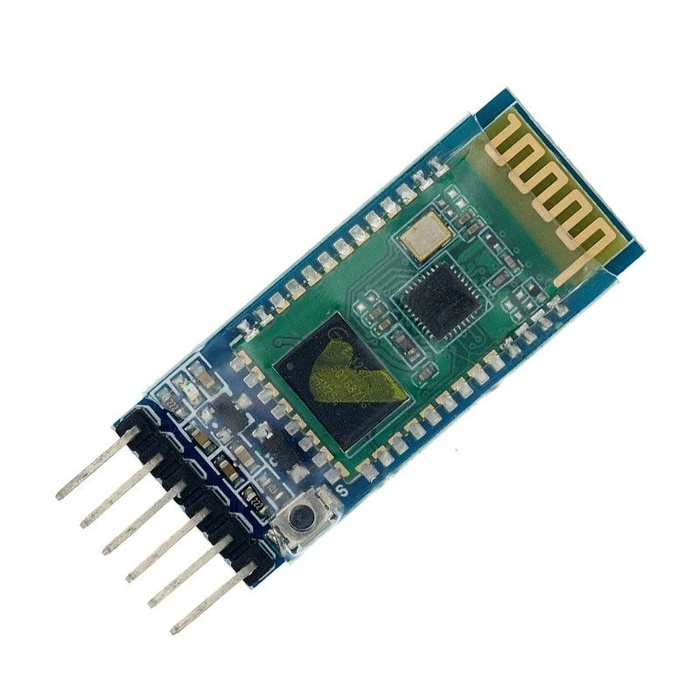
План будет простой. Возьмем самую дешевую машинку с радиоуправлением, добавим ардуино с блитузм модулем и будем управлять этим всем с помощью нейроинтефейса ms-04d.
Для того чтобы заставить это всё работать вместе нужно будет сделать несколько простых шагов. Инструкция будет максимально подробная.
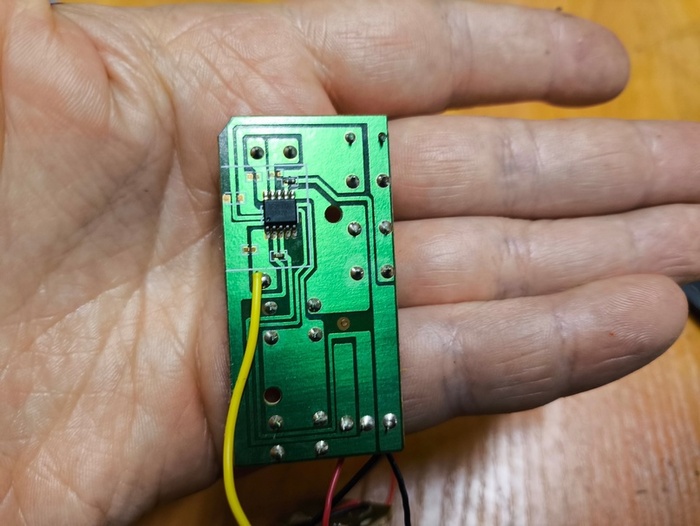
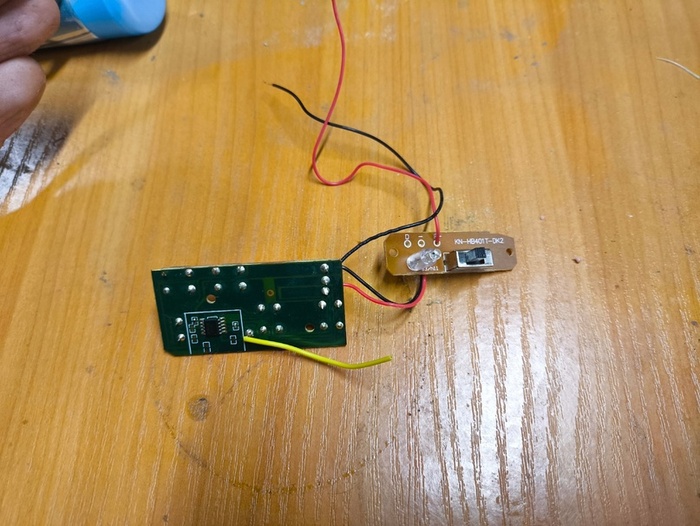
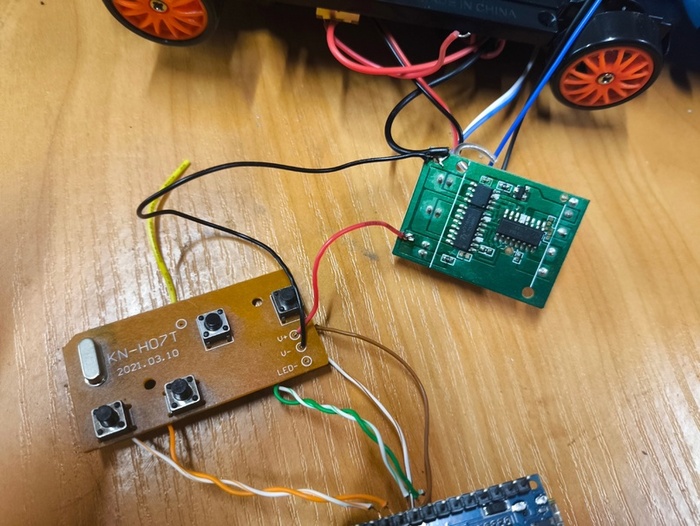
Разборка пульта. Нам нужно разобрать пульт управления машинкой и вытащить из него схему
В пульте будет 2 схемы: с кнопками и с переключателем и светодиодом. Вторую удаляем.
Нам нужна только с кнопками и микросхемой RF2175.
Микросхема не должна быть повреждена.
Отключаем схему от пульта и платы с светодиодом.
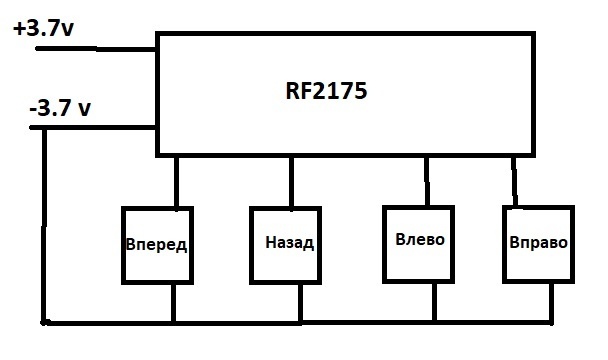
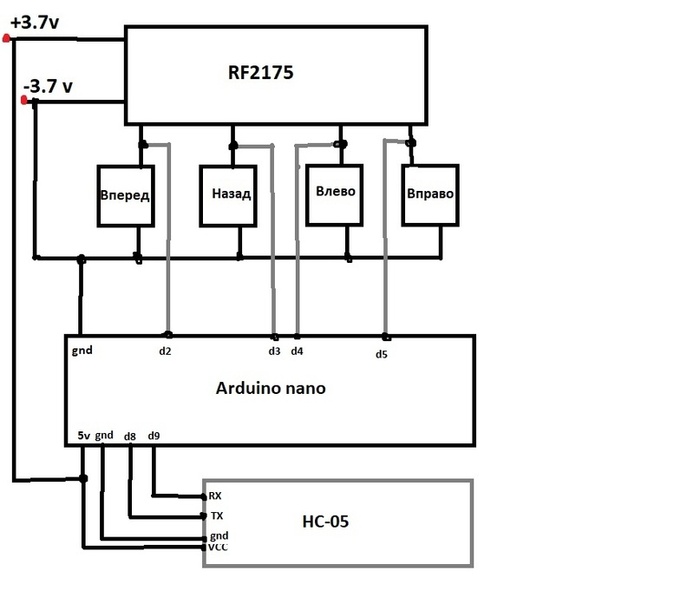
К микросхеме RF2175 на схеме подключены 4 кнопки: вперед, назад, повороты вправо и влево. В общем виде всё подключено вот так:
Нажимая на кнопки мы подаем минус на отдельные порты микросхемы. Ардино нано может выдавать на порты как минус так и положительный сигнал и если мы заменим кнопки на порты ардуино то мы сможем программно задавать направление движения.
или же сделать как описано ниже.
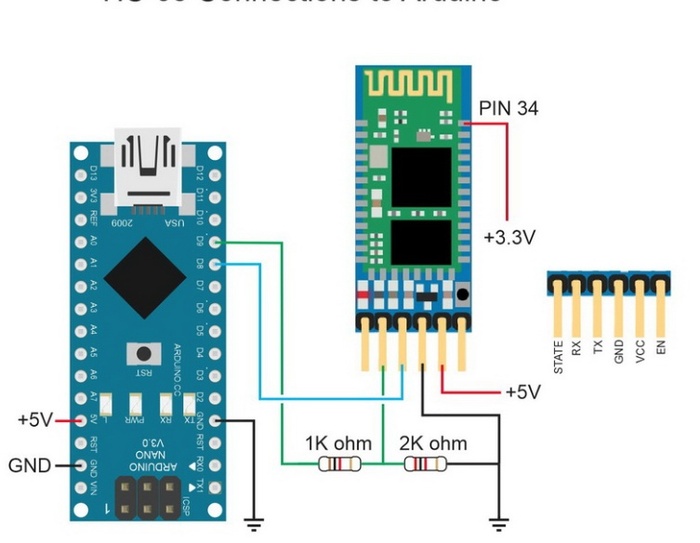
Нам нужно определить мас адрес нейроинтерфейса. Это можно сделать по инструкции тут http://developer.neurosky.com/docs/doku.php?id=mindwave_mobile_and_arduino .Или же через иные проги. Я делал это через прогу nRF connect с гугл плея. Схема подключения модуля. Можно без резисторов сразу RX к выводу D9. И не трогать пин 34 если есть маленькая кнопочка рядом с выводами.
Далее:
Запустите приложение Arduino на компьютере.
Подключите USB-кабель Arduino к компьютеру. На Arduino должен гореть зеленый свет.
Загрузите файл .ino скетча, расположенный в конце этого шага, или скопируйте следующий код, который передает данные между Serial Monitor Arduino и модулем Bluetooth, и вставьте его в новый скетч Arduino.
SoftwareSerial mySerial(8,9); // указываем пины tx и rx
void setup() {
pinMode(8,INPUT);
pinMode(9,OUTPUT);
Serial.begin(9600); // включаем hardware-порт
mySerial.begin(38400); // включаем software-порт
Serial.println("start setting");
}
void loop() {
if (mySerial.available()) {
char c = mySerial.read(); // читаем из software-порта
Serial.print(c); // пишем в hardware-порт
}
if (Serial.available()) {
char c = Serial.read(); // читаем из hardware-порта
mySerial.write(c); // пишем в software-порт
}
}
4. Загрузите скетч.
5. Удерживая нажатой маленькую кнопку над контактом EN на HC-05, подключите VCC HC-05 к + 5 В Arduino и удерживайте кнопку нажатой в течение нескольких секунд, пока красный свет на HC-05 не начнет мигать в течение 2 секунд.
6. Откройте монитор последовательного порта Arduino (правый верхний угол окна приложения Arduino) на компьютере и установите для параметров в правом нижнем углу значения “Both NL & CR” и скорость передачи данных “9600”.
7. Откройте внутри строки ввода окна Serial Monitor. Введите AT на клавиатуре компьютера и нажмите Return. Если ответ «ОК», продолжайте. Если не «ОК», попробуйте еще раз. Иногда с первого раза не получается.
8. Включите нейроинтерфейс. Индикатор на нем должен гореть постоянно синим.
9. Введите AT-команды, как прописано ниже. Ответ должен быть «ОК» после каждой команды.
AT + UART = 57600,0,0 Определяет скорость передачи, она такая и в ms-04b и в neyrosky.
AT + ROLE = 1 Устанавливает HC-05 в качестве ведущего устройства, а не ведомого.
AT + PSWD = 1234 Устанавливает пароль, используемый интерфейсе.
AT + CMODE = 0 Для подключения HC-05 к определенному устройству.
AT + CLASS = 0 Определяет класс устройства.
AT + INQM = 1,9,48 Устанавливает параметры для сопряжения.
AT + INQ, команда чтобы узнать, распознает ли HC-05 интерфейс. Поиск интерфейса может занять 15-20 секунд. Одно из отображаемых устройств должно иметь тот же адрес, что и интерфейс, в формате xxxx: xx: xxxxxx. Этот адрес используется в следующих 3 командах (показаны как addr), за исключением того, что двоеточия должны быть заменены запятыми.
AT + PAIR = addr, 30 (здесь не было ответа «ОК».)
AT + BIND = addr (красный свет на HC-05 мигает каждые 2 секунды)
AT + LINK = addr
10. Красный индикатор HC-05 должен мигать 2 раза каждые 3-4 секунды. В первый раз, когда мастер прописал команды частота моргания не изменилась. Поэтому он дважды проверил, правильно ли установлены контакты проводов на Arduino и макетной плате, вытащил провод + 5В из HC-05, выполнил снова шаг 5 и набрал команды PAIR, BIND и LINK. На этот раз красный индикатор изменился на 2 быстрых мигания каждые 3-4 секунды. Это значит, что устройства сопряжены. В следующий раз, при пользовании устройствами, они автоматически подключатся к ним в течение нескольких секунд.
11. Отсоедините провод TXD HC-05 от вывода 10 Arduino и подключите его к RX (вывод 0) Arduino. Отсоедините провода HC-05 от делителей напряжения и снимите их, а также снимите резисторы, используемые в качестве делителей напряжения. Теперь проводка должна быть такой, как показано на фото.
12. Закройте Serial Monitor.
13.Отключите интерфейс.
14. Отсоедините USB-кабель от Arduino или компьютера.
15. Закройте приложение Arduino.
! Модуль может не отзываться на команды и скорее всего были просто перепутаны выводы RX и TX. Достаточно просто поменять и будет работать !
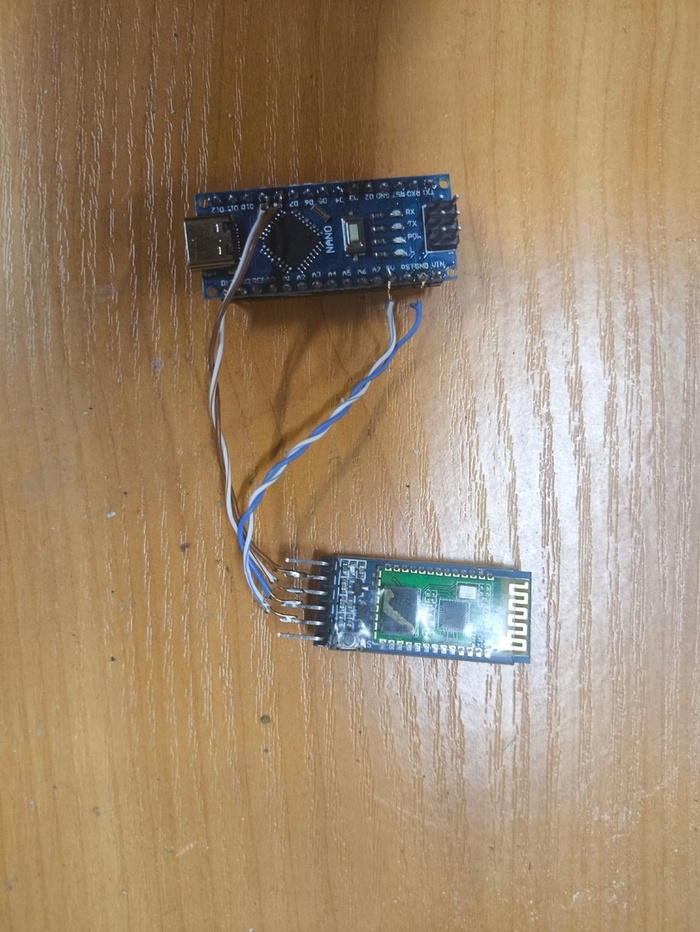
После того как модуль HC-05 прошился мы его никуда не переносим. Так же оставляем как он и есть.
Далее нам нужно припаять ардуино нано к плате управления машинкой с rf2175. Схема соединения очень простая. Мы подключаем цифровые порты 2,3,4,5 вперед кнопок и будет подавать минус с ардуино.
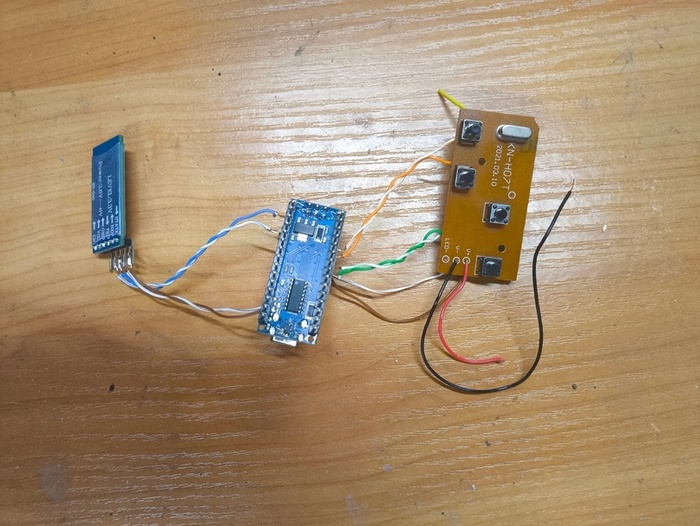
А вот так оно будет выглядеть в живую.
На этом пайка почти завершена. Осталось впаять готовы блок в машинку и запитать от аккумулятора.
Но перед запайкой и конечным монтажом нам нужно сделать самое важное - написать код управления.
Нейроинтерфейс MS-04D довольно функциональное устройство и может выдавать большой спектр данных:
1.Исходная электроэнцефалограмма
2.Определяются следующие мозговые волны: Дельта, Тета, Низкие Альфа, Высокие Альфа, Низкие Бета, Высокие Бета, Гамма
3.Данные с гироскопа: Ускорение по трем осям и угловая скорость по трем осям.
4.Данные о концентрации и расслаблении человека.
Любые их этих наборов данных мы можем взять как данные для управления, но генерировать нужные ритмы будет куда сложнее чем концентрироваться и расслабляться.
Сделаем оба варианта. Почему и нет?
1.Вариант с концентрацией и расслаблением.
Алгоритм следующий:
Если концентрация выше расслабления то машинка едет вперед
Если концентрация меньше расслабления то машинка едет назад
Если концентрация нулевая то машинка поворачивает вправо
Если расслабление нулевое то машинка поворачивает влево
Анализ будет происходить в самом нейроинтефейсе, а машинка будет только принимать сигнал управления.
Теперь мы можем интегрировать эту схему в машинку. Вся система управления будет там.
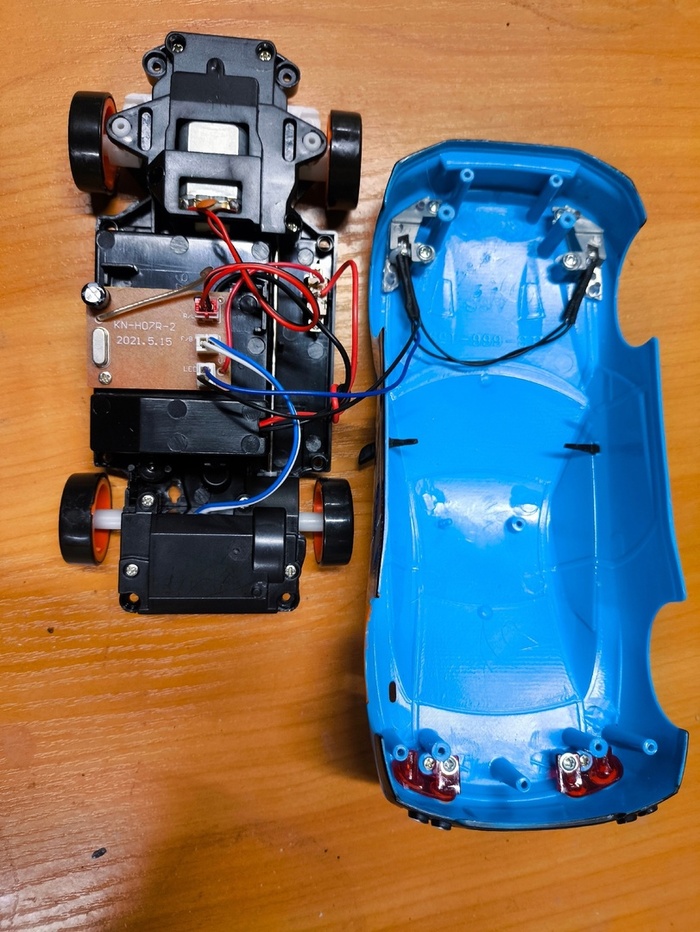
Теперь приступаем к самой машинке. Это будет самая быстрая часть. Аккуратно снимает верхнюю крышку.
Снизу будут болты и зажимы.
Вскрываем ей до конца.
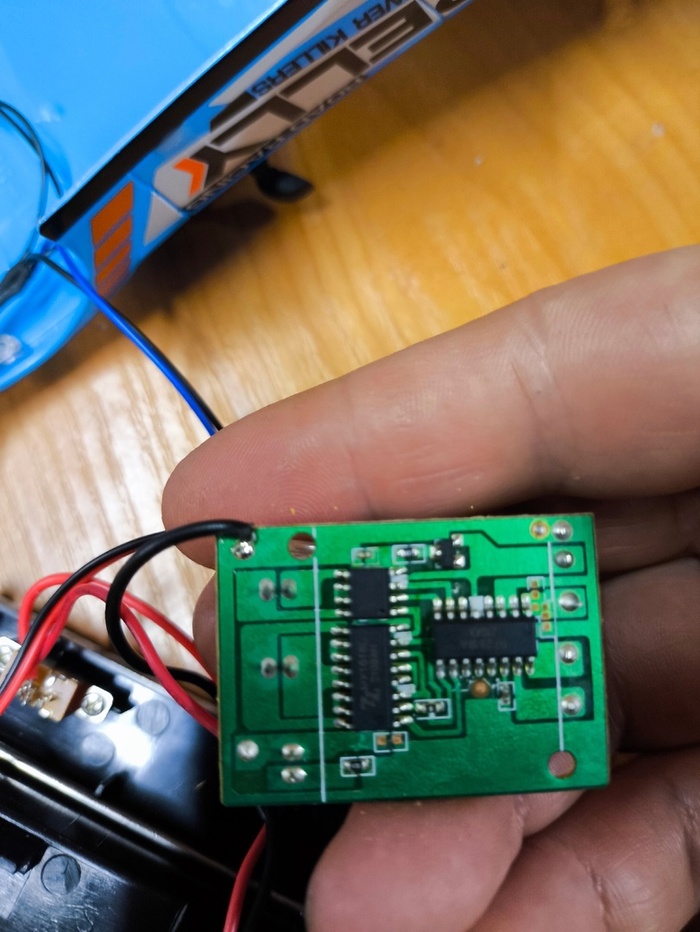
Можем увидеть маленькую схемку, 2 мотора, выключатель питания и штекер для аккумулятора.
Далее берем платку пульта с ардуино нано и припаиваем к питанию этой схемы. Питание идет через красный и черный провод.
Черный идет напрямую от аккумулятора, а красный от переключателя. Мы припаиваемся красный к красному,а черный к черному
Ну и собственно всё. Теперь аккуратно запаковываем всё обратно в машинку и сворачиваем болтики. Аккумулятора в 3.7в хватит для питания машинки и всей системы.
Для запуска всей системы мы должны включить нейроинтерфейс, подождать секунд 10 и запустить машинку. Опять же подождать пока будет соединение. Если все сделали правильно то машинка поедет в зависимости от залитого кода и уровней ритмов/показателей концентрации . Ну и видео с тестом.
Чуть потренироваться и можно будет направлять куда нужно. Теперь точно всё. Проект простой и делается за пару дней, но дает огромный опыт в нейропроектах.
Всем привет! Хочу немного рассказать о модульном экзоскелете, который стал основой уже многих проектов.
разные вариации экзоскелета pg-20
PG-20 (так называлась эта моделька) - активный экзоскелет ног. Таких экзоскелетов разработано и создано даже мной очень много, но именно эта модель очень важна для всего моего проекта. Я бы даже сказал именно с этой модели начинается новая фаза моих работ.
И чем же он так может быть интересен? Попробую тезисно и кратко всё объяснить.
1.Полная настройка
Экзоскелеты всегда собирались как штучная и очень привязанная к человеку вещь. Разработка экзоскелета похоже на изготовление доспехов под одного и только одного человека. Так бывало чаще всего. Pg-20 изначально разрабатывался как конструктор. Он, да и последующие после него модели (за исключением PG-22 (кисти) ), собран из элементов не более 30 см в длину. Так же важно что все элементы сделаны методом лазерной нарезки (ну или раскройки фрезером). Экзоскелет собирается из многих элементов и скрепляется болтами. На фото ниже пробные ступни этого экзоскелета. Ещё без креплений.
Ступни состоят из 5 пластиковых и плоских элементов, скрепленных болтами и металлическими готовыми уголками.
Длину ног можно регулировать в довольно больших пределах т.к. регулировочных элементов по 4 штуки на ногу. Можно настроить и на ребенка и на взрослого человека. С разными параметрами ног и разным расстоянием от колена до бедра и от колена до ступни.
2.Активный элементы представляют из себя готовый и унифицированный модуль
Активный модуль этого экзоскелета позже перешел и в модель 23, но изначально разрабатывался для модели 20.
Модуль представляет из себя подсумку с аккумуляторами и электроникой, систему управления, 4 полностью независимых друг от друга приводов.
Работа модуля
Все приводы крепятся на мелкие болтики и сдвоены. Это сделано чтобы не создавать смещения при работе т.е. приводы давят на ногу равномерно. Суставы экзоскелета, как можно заметить, это обычные подшипники. Ниже фото колена и коленного привода. Зеленая стропа - крепление к ноге.
А вот так выглядит бедро. Тут можно заметить и бедренный привод и тактический пояс, служащий тут главным креплением к человеку.
Все стропы соединены через кобру. Это самое прочное и удобное соединение.
3.Универсальность и открытость
Этот экзоскелет уже стал основой модели 21. Модель 21 это очень мощный и быстрый усилитель бедренных мышц. Использует уже мощные сервы и сделан из стали…но сделан на основе всех идей что были проработаны в модели 20.
И модели 23. Это пассивный экзоскелет вообще. Нет приводов, но можно подключить активный модуль от модели 20 и будет отличный стальной активный экзоскелет
Модель 20 может даже служить основой для робота, но это уже другая история.
Что можно добавить по итогу?
В прошлом году получилось сделать простой, серийный и если нужно массовый скелет. Его можно распространять и модифицировать как хочется. Теперь нужно лишь улучшать и закреплять успехи этой модели.
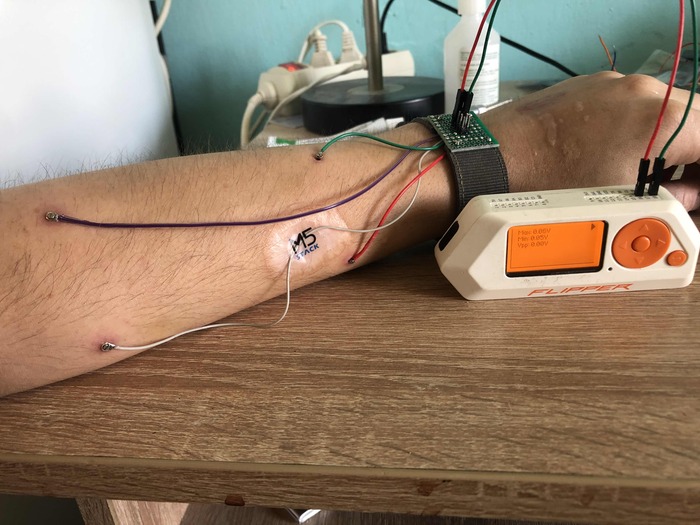
Не так давно провел очень интересный опыт со своим нейроинтерфейсом. Нейроинтерфейс новой модели и был доработан до работы с дронами только к концу прошлого года. Но для начала напомню что это вообще такое.
Нейроинтерфейс (или интерфейс «мозг – компьютер») – так называется устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умного дома», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.
Нейроинтерфейсы бывают инвазивные и неинвазивные. Инвазивные это те что внедряются в череп. Они очень сложны и опасны в использовании и установке. Мой нейроинтерфейс неинвазивный и полностью безопасный. MS-04D (это версия конца 23 года) является дальнейшей глубокой модификацией модели MS-04C (это версия конца 22 года) . И несмотря на внешнее сходства имеют много отличий.
MS-04D имеет встроенный контроллер ардуино нано. Это позволяет не только быстро изменять и дополнять стандартную прошивку, но и загружать свои алгоритмы анализа.
Встроенный акселерометр гироскоп. Это позволяет определять движение головы. По сути ещё один канал данных .
Собственный протокол N-03 . В отличии от протокола нейроскай более понятен и не зашифрован. К протоколу нейроскай была добавлена возможность работы с lsl.
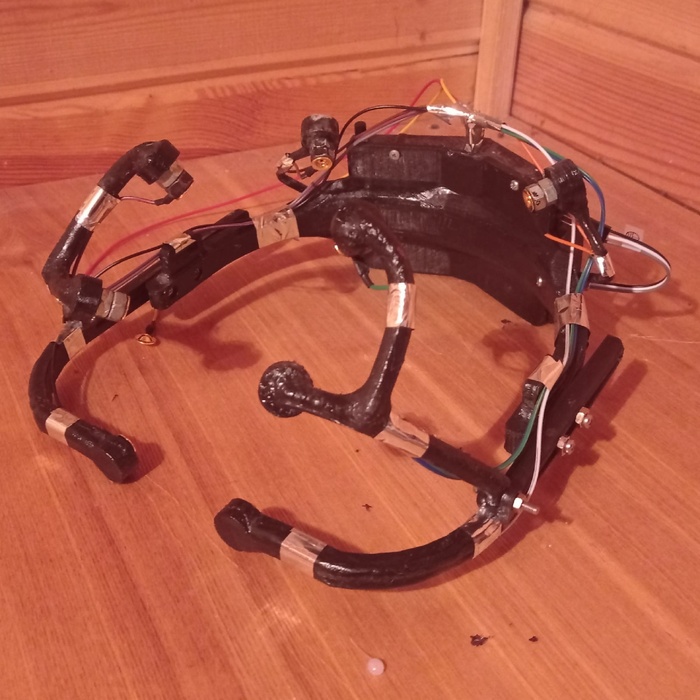
Ms-04D является одноканальным неинвазивным нейроинтерфейсом . Этот интерфейс снимает ЭЭГ и данные с гироскопа и отправляет его через bluetooth на сопряженное устройство (телефон, пк, иные bluetooth устройства) .Так же возможна работа через USB. Устройство может как проводить простейший анализ само, так и посылать сырой сигнал на устройство.
Само устройство сделано пластикового печатного корпуса (пластик petg) и электроники на затылке. Чтобы обезопасить электронику от случайных ударов она закрыта в коробочки. Питание осуществляется через встроенный аккум . Зарядка через usb. Устройство одноканальное. То есть оно снимает сигнал с одной точки на лобной доле. Можно снимать как с правой так и левой доли.
Для съема такого сигнала нужны особые точки относительно которых проходит измерения. В нашем случае это мочки ушей. Там нет эл. сигналов и поэтому на них крепятся прищепки — электроды.
В устройство встроены фильтры шумов и очень мощный усилитель — сигнал проходит всегда.
Анализируется следующая информации :
1.Исходная электроэнцефалограмма (сырец сигнал нужен для протокола lsl)
2.Определяются следующие мозговые волны: Дельта, Тета, Низкие Альфа, Высокие Альфа, Низкие Бета, Высокие Бета, Гамма
3.Данные с гироскопа: Ускорение по трем осям и угловая скорость по трем осям.
Собственно был дрон JJRC H36 Mini. Простой и мелкий дрон с пультом. Работающий через 2.4 ггц радио сигнал. Управлять...довольно сложно , но взлет почти стабильный. Команда на взлет и полет "вперед" осуществляется увеличением интенсивности альфа-ритма мозга. Ну если по простому то при определенном уровне расслаблении и уменьшения концентрации на чем то дрон и активируется. Команды на полет в сторону дает уже бета ритм. Это как раз концентрация. Разная бета - разные стороны полета. Ну и корректировка полета встроенным гироскопом.
Вообще после тренировки с этим всем может справиться каждый. Очень важно чтобы вокруг не было помех только.
Это не первый и не последний нейроинтерфейс. Сейчас ведутся работы уже по улучшению 8 канального и оптимизированного на чтение "мыслей о движении" ( т.к. называемых воображаемых движений с моторной коры). Тут на порядок сложнее всё делается.
Ну и напоминаю что про это всё можно почитать у нас в группе или посмотреть другие нейропроекты у нас в дискорде.
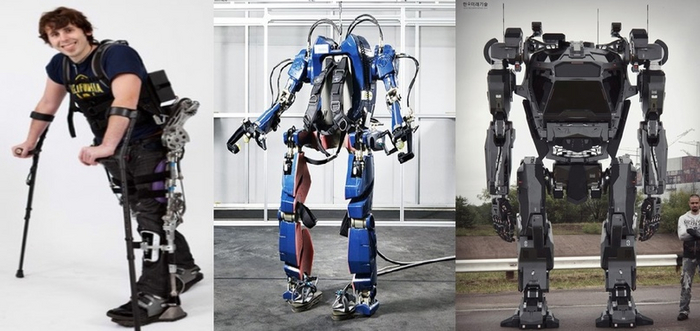
В последние годы эволюция роботов подошла к черте водораздела, породив две уникальные ветки развития: мягкую и жёсткую робототехнику.
мягкий робот
С экзоскелетами произошло то же самое. Так называемый «жёсткий» экзоскелет стал своеобразным эталоном для большинства приборов этого класса. Он повышает силу человека, позволяя поднимать тяжёлые грузы и снимая избыточное напряжение с костей и связок. Разумеется, экзоскелеты вызывают большой интерес у спасателей, пожарных и медиков, которые работают в условиях больших нагрузок. Экзоскелет, в первую очередь, «заточен» под биомеханику человеческого тела и должен работать в плотной интеграции с опорно-двигательным аппаратом носителя. Эта черта выступает основным ограничением для экзоскелетов, но в ней же сокрыт и потенциал их развития.
Контакт тела с плотной деталью экзоскелета быстро вызывает конфликт между ней и живыми тканями. Обойти его можно двумя путями: использовать биологически инертные и нетравматические материалы или же физически разделить человека с роботизированной периферией. Первый подход неплохо показывает себя в деле бионического протезирования конечностей. Второй использовала научная группа, которая занималась разработкой «третьей» руки.
Но кроме силы существуют и другие параметры. В первую очередь — выносливость. Во вторую — ловкость. А вот с ловкостью у «жёстких» экзоскелетов большие проблемы. Сложная система рычагов и приводов, характерная для классического подхода к носимой робототехнике, мало напоминает одежду.
Мягкий экзокостюм не наделяет человека сверхъестественной силой. Вместо этого он поддерживает работу врождённой мускулатуры, позволяя экономить энергию во время марш-бросков и выполнения стереотипных движений. Вместо прибавки к силе он повышает выносливость человека. Функционирование устройства осуществляется по интуитивно понятному принципу. Его суть — помощь в подошвенном сгибании и разгибании голеностопного сустава, а также аналогичных действиях по отношению к бедру.
В биологическом организме движителем выступают мышцы. Сокращаясь, они тянут сухожилия, а те, в свою очередь, передают усилие на кость. Интересен факт, что наши рычаги не слишком эффективны. Точка на кости, где «сидит» сухожилие, расположена вдали от дистального конца руки или ноги. Тянуть рычаг за короткое плечо — значит проиграть в силе. С другой стороны, такая особенность анатомии даёт ощутимую прибавку к скорости движения.
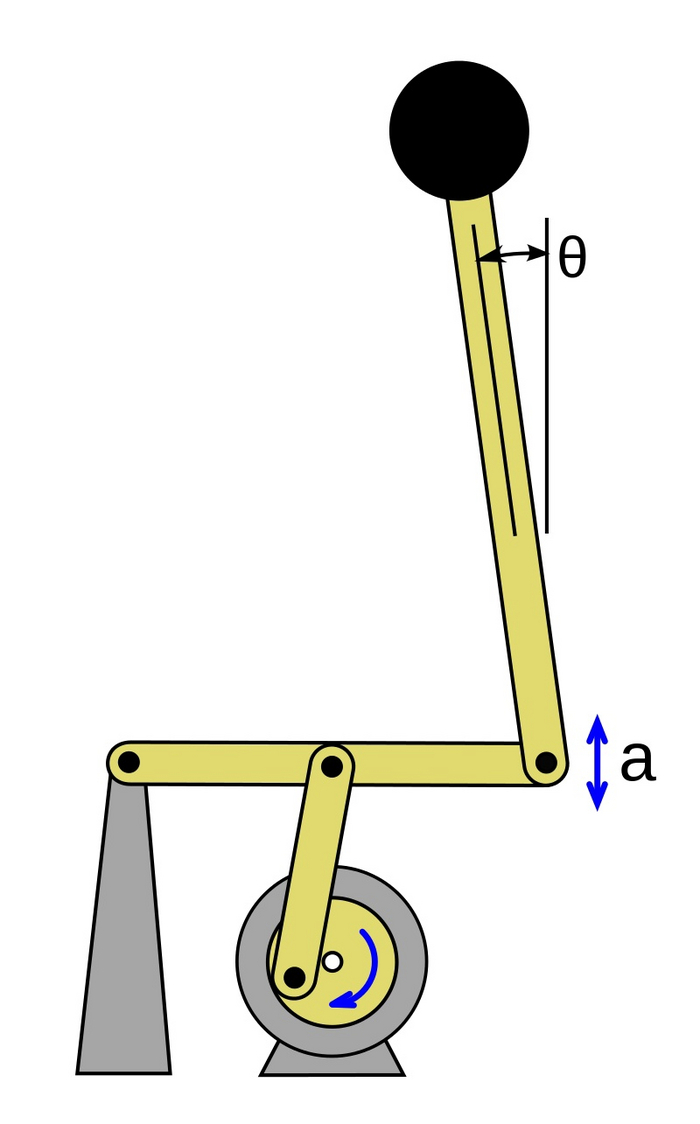
Именно поэтому все наземные животные адаптированы к отталкиванию от поверхности. Но тут возникает новый вопрос: почему человек не опрокидывается во время ходьбы? Посудите сами — наш центр масс расположен достаточно высоко. Во время движения мы переносим точку опоры, регулярно оказываясь в состоянии контролируемого падения.
Если рассматривать стоячего человека как математический маятник, то у него будут две точки равновесия — верхняя и нижняя. Точки равновесия можно описать как состояния системы с наименьшей энергией. При этом равновесие в верхней точке будет неустойчивым и нарушится от любого возмущения. Или нет? Выяснить это наверняка помогает маятник Капицы. Этот прибор поражает своей неочевидностью. Груз, прикреплённый к нерастяжимой спице, соединён с вибрирующим подвесом. В случае цикличных вибраций подвеса по направлению вверх-вниз наш грузик не просто выталкивается в возвышенное положение — он как бы застревает там
Вибрационная механика родилась в тот момент, когда академик Капица сумел разработать математический аппарат для описания уже известных колебательных процессов.Человеческое тело приобретает устойчивость во время ходьбы за счёт колебательных движений голеностопного сустава. Во время шага или бега любой из нас напоминает перевёрнутый маятник, чей центр находится около стопы, а подошвенная поверхность играет роль вибрирующего основания. Центр маятника не стоит путать с центром массы. Наше прямохождение развивалось в ходе долгих эволюционных процессов, но даже они так и не смогли решить проблему возможного опрокидывания человека.
Вернёмся к экзокостюму. Исходя из принципов биомеханики ходьбы, учёные получили возможность прямо влиять на перевёрнутый маятник и даже усиливать его конструкцию.
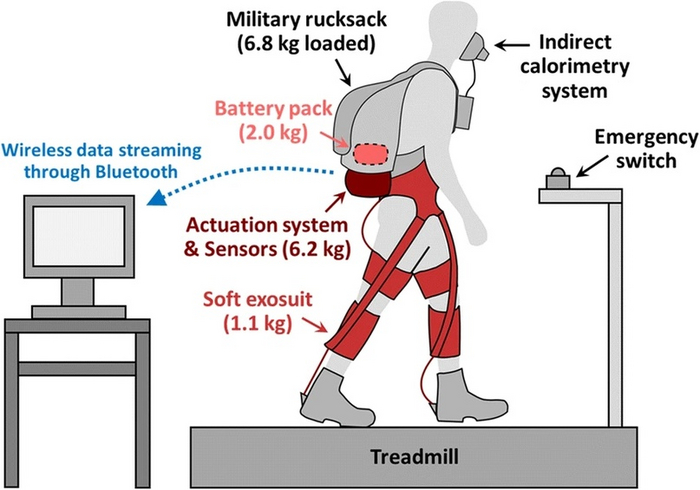
Устройство состоит из двух критически важных блоков: системы срабатывания и передающего комплекса, который транслирует усилие на приборы-исполнители. Первый блок установлен в рюкзаке армейского образца. Тросы Боудена выступают проводником, через который экзокостюм развивает необходимое усилие.
Контроллер функционирует пошагово. Он разбивает программу движения на комплекс итеративных команд. Так обеспечивается многосуставная помощь для сгибания подошвы и разгибания бедра во время шага. Этот метод хорошо показывает себя, когда усилие формируется в соответствующий момент. Для этого был разработан весьма прогрессивный метод онлайн-мониторинга, о котором будет рассказано позже.
Контроль эффективности
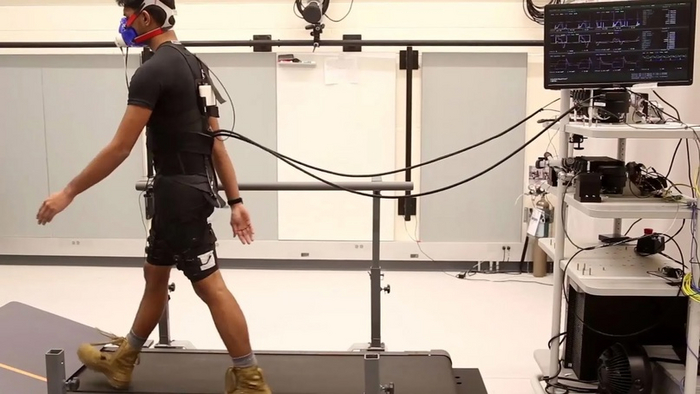
Как определить реальную эффективность костюма? Ответ простой: замерить метаболические затраты человека с этим устройством и без него. Для этого испытуемым предложили идти по беговой дорожке со скоростью 1,5 м/с, неся на плечах рюкзак весом 6,8 килограмм.
Результаты оказались интересными. Начнём с того, что в подобных исследованиях существует множество «подводных камней». Главным, но отнюдь не единственным выступает индивидуальная анатомия. Все люди разные, хоть и относятся к одному биологическому виду. Кто-то экономно расходует энергию, а кто-то прожигает питательные вещества, как мартеновская печь. Следовательно, константа, выведенная для конкретного добровольца, может оказаться мало применимой к другому!
Метод онлайновой настройки параметров позволяет нивелировать этот негативный эффект и динамически адаптировать экзокостюм под потребности конкретного носителя. Для начала исследователи строили положительную карту возможностей. Она описывает спектр воздействий, позволяющих повышать усилие голеностопного сустава и не наносить ему травматических повреждений.
Калибровка экзоскелета
Любой экзоскелет — это устройство для расширения человеческих возможностей. Даже наиболее совершенные гаджеты не могут выступать в роли телепатов. Чтобы механика «разобралась», чего от неё хотят, нужно каким-то образом наладить контакт приводов с нервной системой человека.
Исследовательские группы по всему миру активно работают над разработкой методов управления, но аспекты адаптивной настройки контроллера до сих пор представляют изрядную сложность. Традиционный подход сводится к ручной настройке экзоскелета. Оператор или носитель устройства смотрит на параметры походки, а после вносит исправления. При всей простоте этот метод априори будет субъективным. Значит, оператор должен быть весьма продвинут в работе с программно-аппаратной оболочкой экзоскелета. Более современное решение — отдать часть «скучной» работы на своеобразный аутсорс.
В этом случае на носимом компьютере будут непрерывно обрабатываться сложные алгоритмы, чей список весьма обширен:
Принятие решения, в какой момент направить физическую помощь суставу.
Для этого система должна знать, от чего ей отталкиваться. Метаболические затраты человека можно исследовать разными способами, но самым простым выступает измерение дыхания. По его частоте, глубине, а также концентрации углекислого газа на выдохе можно делать выводы о том, насколько интенсивно протекает энергетический обмен.
Динамические модели передвижения всегда ориентированы под конкретную модель экзоскелета. Вычислительные алгоритмы представлены множеством вариантов. К ним относят обучение пользователя с помощью инструктора, поиск экстремумов и адаптивное динамическое программирование.
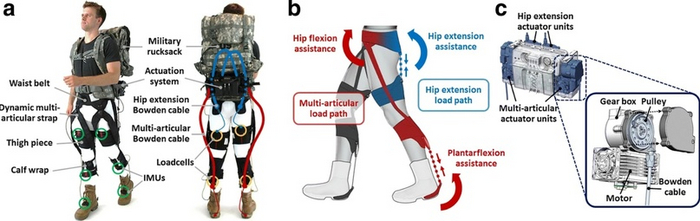
Как уже говорилось в этой статье, многосуставной мягкий экзоскелет облегчает ходьбу через подошвенное сгибание, а также разгибание в тазобедренном суставе. Его компоненты представлены поясным ремнём, двумя набедренными блоками, мягкими подвесами между икрами и передней частью талии, а также специальной обувью. Общая масса всех комплектующих — всего лишь 1 кг 100 г с учётом двух металлических кронштейнов на задниках ботинок.
Устройство активно взаимодействует с ногой через две точки приложения:
Сгибание бедра во время первой фазы отталкивания.
Многосуставное разгибание, после которого наступает новая стадия ходьбы.
На этом изображении видны компоненты экзокостюма и некоторые устройства для аппаратного облегчения ходьбы. А: Красные и синие линии — прокладки тросов Боудена. Толстыми линиями обозначены оболочки, а тонкие показывают ход самих тросов. Зелёные и жёлтые кру
Обратим внимание на исполнительную систему. Её части расположены в рюкзаке. Четыре независимых приводных блока обеспечивают развитие усилия. Механизм-исполнитель представлен безрамным шестиполюсным мотором Emoteq от американской компании Allied Motion Ink. Коробка передач Spiroid обеспечивает передаточное число 38:1 для приводных блоков и 36:1 в случае процесса разгибания бедра.
Исполнительная система передаёт развиваемое усилие на экзокостюм с помощью тросов Боудена. То есть при втягивании струны сокращается расстояние между несколькими точками крепления, которое можно и нужно замерить. Желательно — в режиме онлайн.
Всё это запитано от литий-полимерного аккумулятора весом 2 кг. Его заряда вполне хватает на 8 км непрерывной ходьбы.
На каждой ноге испытуемого расположено по шлейфовому жгуту. Он включает пять инерциальных блоков для динамических измерений: IMU, MTi-3, а также два тензорных датчика LBS200. Эти приборы собирают данные в реальном времени. Блоки инициируют каскад принципиально важных замеров, таких как определение ориентации экзоскелета в плоскости движения, а также угловой скорости каждого сегмента.
Датчики нагрузки идут параллельно с боуденовскими тросами. Они мониторят уровень вспомогательной силы, которая направляется носителю системами экзокостюма.
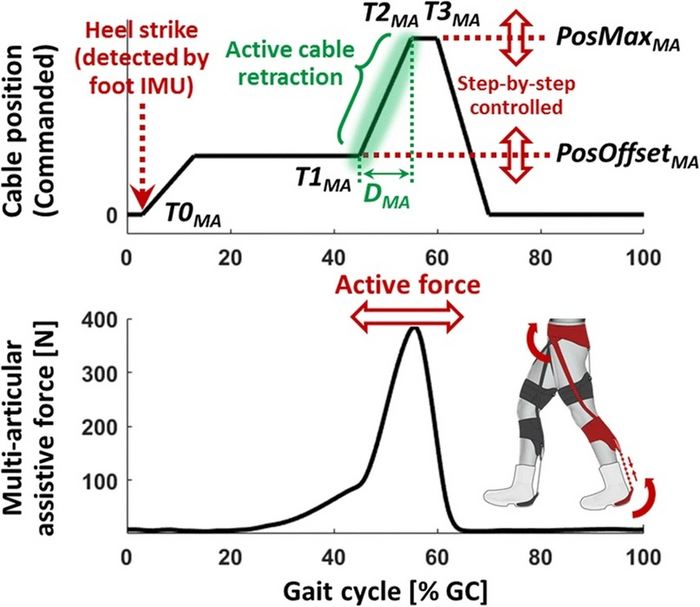
Экзокостюм обеспечивает поддержку ходьбы, втягивая тросы Боудена синхронно с движениями в суставе. Профили положения троса рассчитываются исходя из четырёх параметров: Т0, Т1, Т2 и Т3. Каждый из них занимает определённую процентную величину в цикле ходьбы. Следующие параметры, PosOffset и PosMax, можно получить, выполнив комплекс итеративных вычислений во время работы устройства.
На этом изображении представлены данные о работе многосуставного контроллера. Вверху обозначен профиль положения боуденовского троса. Результирующий профиль, через который выражена вспомогательная сила, можно видеть ниже.
Уделим немного внимания разбору этих циклов:
Т0 определяет пределы цикла походки и время запуска контроллера.
Т1 — точка активного втягивания троса.
Т2 выражается в момент завершения активного втягивания — то есть когда механика прекращает адаптивную помощь.
Отпускание троса закодировано в Т3.
Соответственно, PosOffset проявлена в точке Т1 выражает максимальное вытягивание троса Боудена, а PosMax — экстремум, при котором струна оказывается полностью втянута. Он длится от Т2 до Т3.
Удар пятки о поверхность — момент, в который запускается работа экзокостюма. Львиная доля помощи во время фазы отталкивания осуществляется именно в виде реакции на этот триггер. Зелёный цвет выделяет фазу активного втягивания троса. Параметры этой фазы определены промежутком между Т1 и Т2. Настройка параметров управления происходит в тесной интеграции с данными об увеличении развиваемого усилия.
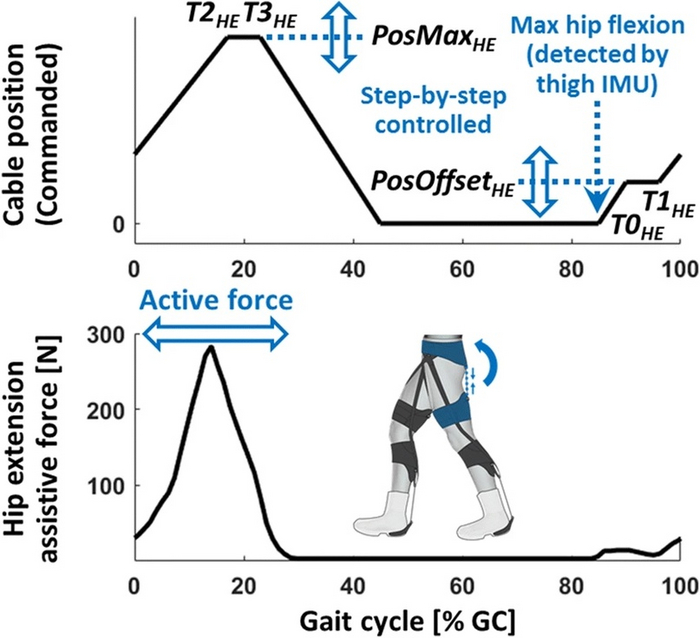
Эта иллюстрация демонстрирует репрезентативные данные о работе контроллеров сгибания бедра. Вверху показан профиль положения троса Боудена. Снизу — результирующий профиль вспомогательной силы. В данном случае поддержка разгибания начинается с выявления точ
И здесь мы подходим к более сложному вопросу: механизму работы контроллера, который следит за нагрузкой в нескольких суставах. Сначала происходит удар пятки в нижней точке траектории. Это не остаётся незамеченным для гироскопа. Такое событие выступает триггером для запуска многосуставного контроллера Т0МА. Тогда включается двигатель, обеспечивая втяжение троса со скоростью 394 мм/с. Такое значение удалось получить в ходе многочисленных испытаний. Если скорость будет ниже, то экзоскелет и носитель начнут работать вразнобой. При ускорении втягивания возникает иной риск — вызвать сгибание до того, как оно понадобится в следующих фазах ходьбы. В таком случае возможно падение человека, а подобных инцидентов следует избегать.
Таким образом устройство достигает PosOffset и сохраняет положение до начала активного втягивания троса в Т1. Оно будет длиться вплоть до PosMaxМА, чья финальная точка — положение Т2.
Затем контроллер фиксирует положение троса, пока тензодатчик не распознает падение силы носителя, которое проявляется во время сгибания голеностопного сустава. Выяснив, что сейчас человек готовится к новому шагу, экзокостюм начинает отпускать трос.
Скорость выпускания зависит от ритма ходьбы. Её верхняя граница — 606 мм в секунду, пока система не достигнет нулевого положения. В нём трос пассивно повисает, чтобы испытуемый не испытывал затруднений при повороте тела и смене траектории. На этом цикл активной помощи можно считать завершённым. После удара пяткой он снова запустится, проходя те же самые итерации.
В конце каждого шага контроллер динамически определяет, уменьшить или увеличить PosOffset PosMax для следующего шага. Это решение принимается исходя из сравнения желаемой и измеренной силы. Учёные экспериментально выявили, что оптимальной пиковой силой в PosOffset будет 75 Н, которая будет приложена во временной промежуток между Т0 и Т1. PosMax обеспечивает пиковую силу в 400 Н между Т1 и Т3 соответственно. Выходит, 400 Н — это и есть выигрыш в силе, которая проявлена во время активного втягивания кабеля.
Это устройство предназначено для помощи в походке, когда разгибательная мускулатура бедра проявляет наибольшую активность. Нюансы биомеханики таковы, что максимальное сгибание бедра наступает на 12% быстрее, чем контакт пятки с поверхностью. В этом случае Т0 соответствует отметке в 0% от полного сгибания бедра. С этого момента двигатель начинает втяжение троса со скоростью 800 мм/с, пока система не достигнет PosOffset.
Такое состояние поддерживается, пока ползунок не заполнится до 7%. От 7 до 28% наступает повторное втяжение троса, которое закончится PosMax на 28%. Пройдя немного больше четверти глобального цикла, контроллер дожидается 34% сгибания. В этот момент наступает следующая фаза работы: отпускание троса со скоростью 800 мм/с.
Контроллер разгибания бедра обеспечивает поддержку в 10 Н в PosOffset между Т0 и Т1, которая переходит во взрывное увеличение силы до 300 Ньютонов между Т1 и Т3. Звучит неплохо, но многосуставная помощь требует калибровки под конкретного человека. Здесь в полной мере раскрывается потенциал онлайновой настройки параметров управления, благодаря которым получится обеспечить максимальную силу, развиваемую в голеностопном суставе. Этот показатель имеет явную корреляцию с метаболическим преимуществом, ради которого и был начат столь прорывной эксперимент.
В цикле ходьбы существует великое множество важных точек. Из него экспериментаторы особенно выделяют два параметра: Т1 и DMA, который рассчитывается по простой формуле DMA = Т2МА — Т1 МА. Следовательно, через DMA выражена продолжительность активного втяжения троса.
Показатели Т1 и DMA лучше всего отображают состояние троса во время активной фазы отталкивания — следовательно, именно в этот момент экзокостюм сообщает большую часть силы голеностопному суставу. Исследователи разработали весьма аскетичный алгоритм, позволяющий наблюдать критически важные параметры ходьбы в режиме онлайн. Настройка занимала 15 минут, пока испытуемые ходили по беговой дорожке. Многосуставной контроллер не сидел без дела, активно замеряя 16 параметров, а также отыскивая те настройки, при которых адаптивная помощь даст максимальный прирост силы.
Всё начиналось с проверки четырёх стартовых условий, при которых Т1 изменяется в пределах 35, 40, 45 и 50% от глобального цикла сгибания бедра. В это же время DMA оставался неизменным на протяжении начальных 15% временного интервала. Среди этих четырёх значений устройство находило такую настройку адаптивной помощи, при которой лодыжка развивает максимальное усилие. При этом экзокостюм получил ряд ограничений, не дающих развивать прирост силы более 400 Ньютонов.
Повторяя эти проверки каждые 2,5-5,0% от длительности цикла, программная оболочка находила значения, при которых прирост силы укладывался в заданные коридоры. Преимущества такого алгоритма состоят в его простоте. Процесс тонкой настройки состоял в динамической смене двух параметров управления. Каждая математическая развёртка по двухмерной матрице учитывала лишь один параметр, а второй оставляла неизменным.
Существуют и другие методы проводить этот комплекс алгебраических вычислений, но такой подход позволял выяснить, в какой мере изменение одного параметра влияет на все остальные процессы во время ходьбы.
Тестирование
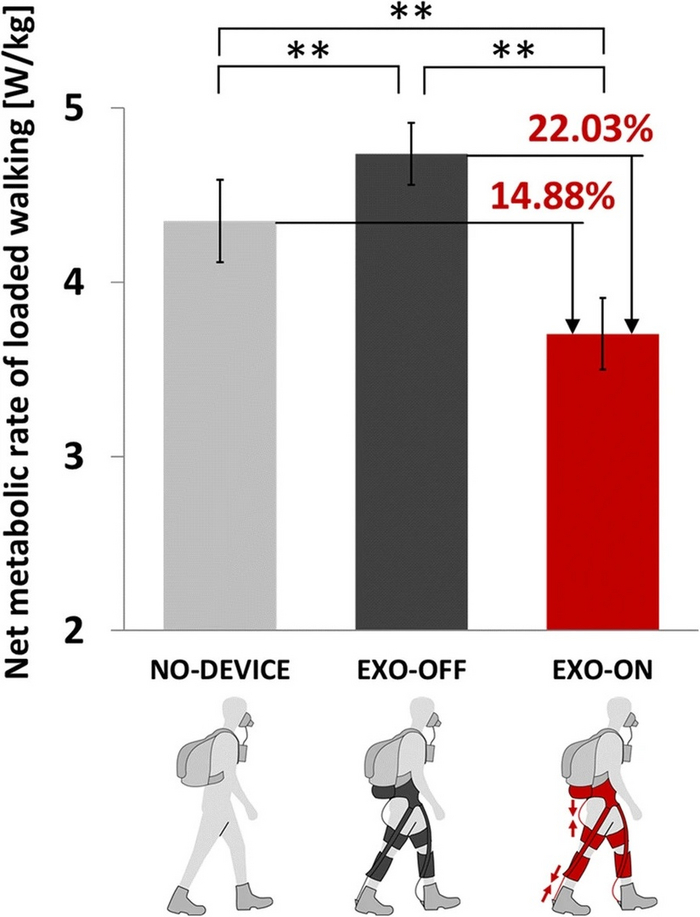
Тестирование экзоскелетов включает ходьбу с нагрузкой без экзокостюма, с отключенным устройством и те же самые действия при включенном гаджете.
Для чистой скорости метаболизма и процентного снижения его интенсивности учёные выявили два важных критерия. Ими стали межсубъектное среднее значение и стандартная ошибка среднего значения. Двусторонние парные t-тесты определили статистическую значимость для разницы в чистой скорости между двумя состояниями.
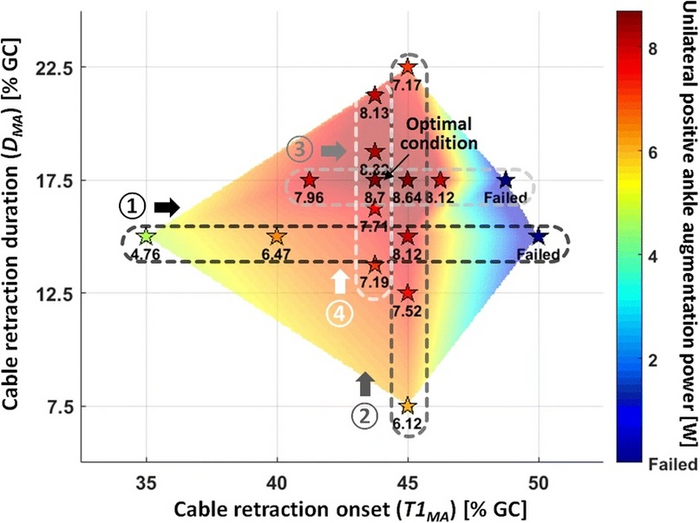
На следующем рисунке можно видеть положительную карту возможностей для увеличения силы, развиваемой в голеностопном суставе:
Так выглядит положительная карта мощности во время настройки контрольных параметров. Звёздочки отражают условия, за которыми наблюдали системы контроля. Числа под каждой из них — положительная односторонняя мощность усиления. Она выражена в ваттах. Стрелки
На следующей картинке показаны параметры управления для конкретного испытуемого, найденные методом адаптивной настройки параметров по результирующим профилям. Начало втягивания троса у пользователя происходило во время фазы Т1 или 43,75-46,25% цикла ходьбы. При этом DMA варьировалась от 13,75 до 22,5%. Эти различия неизбежно приводят к возникновению широкого диапазона профилей силы.
Использование многосуставного мягкого экзокостюма существенно улучшает энергетические затраты на переноску грузов. Как видно из приведённых данных, включенное устройство экономит до 15% энергии носителя и понижает скорость его метаболизма на 20-24%:
Здесь показаны метаболические затраты на переноску груза, собранные по данным трёх статистических выборок. Сплошные столбцы отображают усреднённое значение чистой скорости метаболизма. Двойные звёздочки указывают, что разница между двумя условиями (работа
Экзоскелет оказался жизнеспособным. Он принёс явную метаболическую пользу, сделав движения носителя менее затратными.