Замена двигателя в AKAI GX-77
Фото.
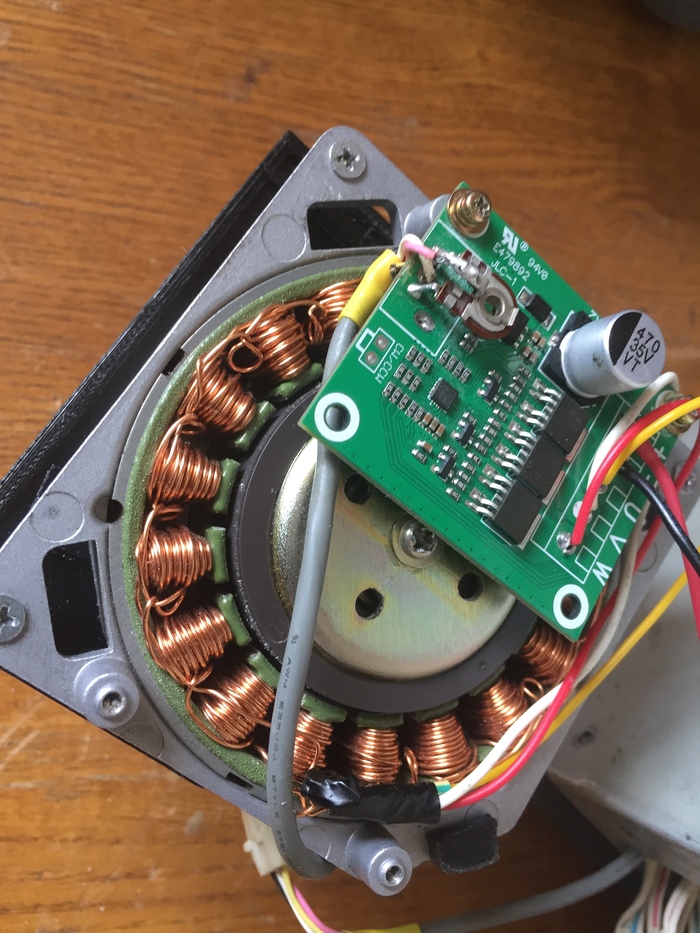
Переходник из пластика
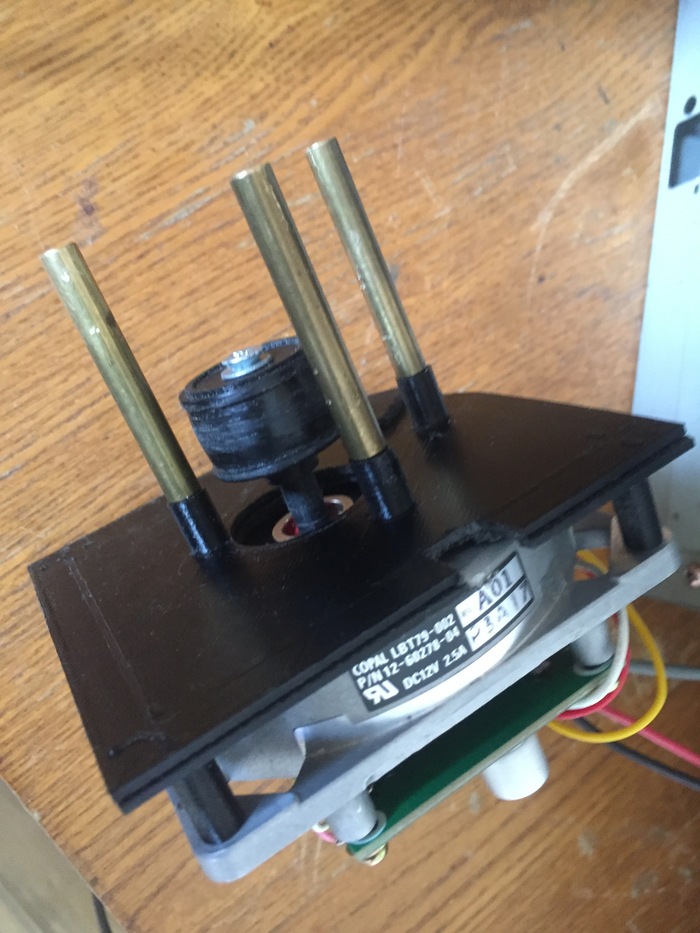
Плата управления китайская

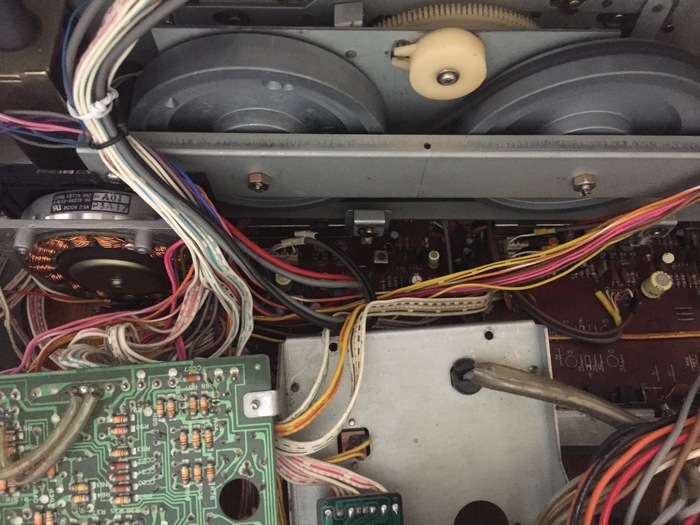
Двигатель установлен
Планку ведущих валов пришлось перевернуть.
Показать полностью
4
Фото.
Переходник из пластика
Плата управления китайская
Двигатель установлен
Планку ведущих валов пришлось перевернуть.
Начало тут:
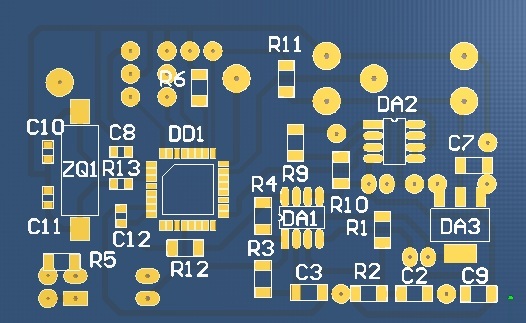
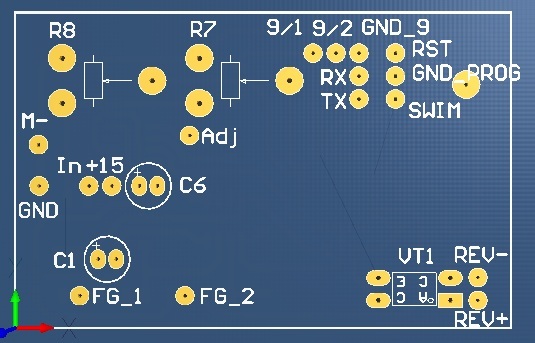
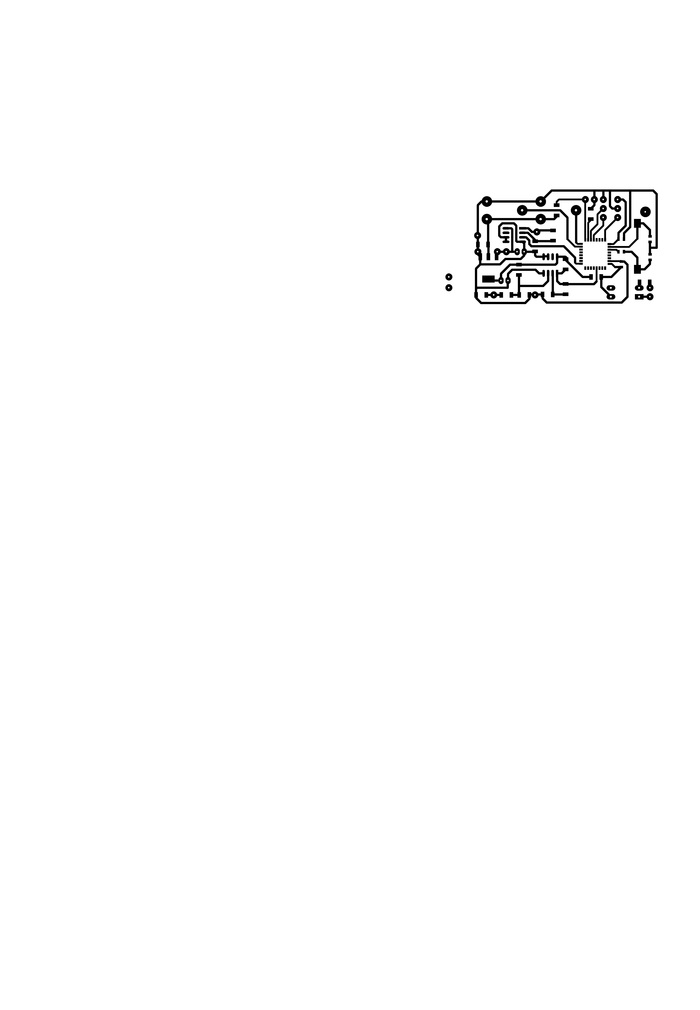
Как и обещал привожу, схему, печатку и исходники.
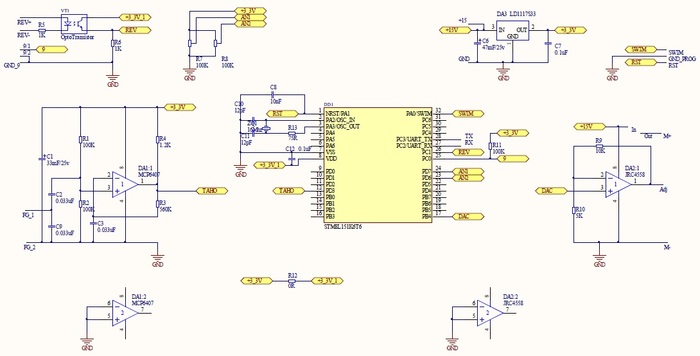
Усиливаем сигнал с таходатчика до прямоугольников с помощью rail-to-rail операционника)
Заводим на пин контроллера.
Через прерывание по пину по спаду импульса запускаем таймер.
Выключаем его на спаде второго импульса.
Так вычисляем частоту двига.
Далее ацп снимаем напряжение на подстроечнике и переводим в требуюмую частоту
Второй подстроечник нужен для реверса, так как частота в прямом и в реверсе у меня отличалась на 15 Герц от 1000. Я связываю это с разным диаметром валов, а может какая ещё причина.
Далее сравниваем реальную частоту с требуемой.
С помощью дака выводим напряжение, которое потом усиливаем другим операционником.
Ну и 317 изменяет выходное напряжение на мотор.
Прога написана в IAR.
так же нужно припаять два провода сюда, для того, чтобы контроллер понимал, что находимся в реверсе.
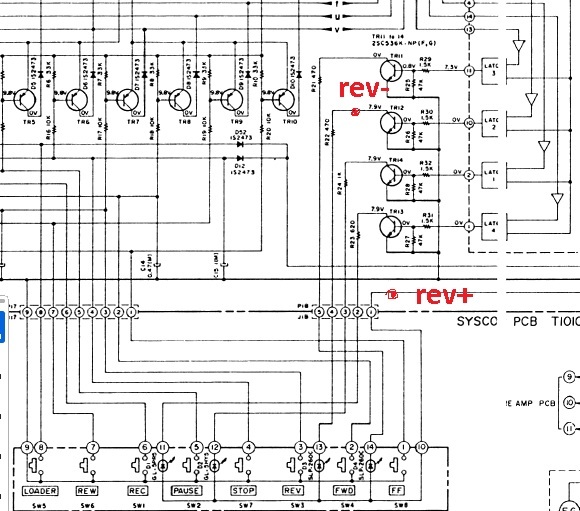
Схема пойдёт не только в акай, но по сути для любого двигателя с таходатчиком.
И всë это из-за того, что не удалось найти живую микросхему UC1003C2 C1003C2
Схема и прошивка не претендует на совершенство, поэтому любая критика вэлком )
Ну и файлы:


Магнитофон куплен с японского аукциона, как было заявлено - обслужен (в Японии, перед продажей). Это поистине легендарный (не люблю эти эпитеты, но этот апп их заслуживает), катушечный магнитофон AKAI 635D с знаменитыми фирменными стеклоферритовыми износиойкими головками серии GX (как уверяют многие владельцы этих аппаратов - «вечные головки»). Аппарат выпускался в конце 70х, но дизайн выглядит впечатляющим и по сей день! Магнитофон реверсивный и не только на воспроизведении, но и на записи! Большие стрелочные индикаторы, сквозной канал в обе стороны, трюковая запись с возможностью плавного нарастания и затухания сигнала (для создания пауз между треками). Поистине мечта советского меломана:)
Пришел он ко мне от знакомого с соседнего города Таганрога, который неоднократно привозил ко мне разную винтажную аудио технику. В одном из своих приездов, увидел работу моего 105го Ростова от беспроводного радиопульта и захотел такой же в своем акайчике, тем более, что в Японии в него уже кто-то врезал ИК пульт, но до нового владельца оный не доехал... Также попросил посмотреть регулятор «pitch», временами плавает скорость. Регулятор почистил, модуль радиоуправления установил:

Установлен внутри, сбоку, подпаян на колодку проводного пульта. В моем распоряжении был модуль на 4 команды (управление: вперед, перемотки, стоп, без реверса и паузы). Работает модуль в импульсном режиме и по сути просто дублирует клавиши управления передней панели.
Видео работы:
Добра, здоровья и благополучия! Мир!
Бонус, делись своим плейлистом в стиле italo disco на яндекс музыке, может кому зайдет подборочка;)
https://music.yandex.ru/users/artash-k/playlists/1006?utm_me...

1960-Akai 33D drum recorder with eith 10 "drum fillers