
История
29 постов
29 постов

13 постов

34 поста
35 постов

29 постов

7 постов
8 постов

39 постов
6 постов

21 пост

8 постов

6 постов

24 поста

3 поста

4 поста
Мы привыкли к тому, что космические корабли рутинно летают к орбитальным станциям, сближаются и стыкуются. Но даже симулятор уровня Kerbal Space Program показывает, насколько это нетривиальная задача — то по расстоянию промахнулись, то скорость не та, то в тень вошли, то слишком много топлива потратили. А ведь в реальной космонавтике были истории, когда после отказа техники сближались вручную, причем, используя инструменты, которые, казалось, давно остались в прошлом. Сегодня мы поговорим о рандеву разнообразных космических аппаратов, от «Джемини» и первых «Союзов» до летающих сейчас к МКС Crew Dragon, Boeing Starliner и «Союзов», научившихся сверхкороткой схеме сближения.
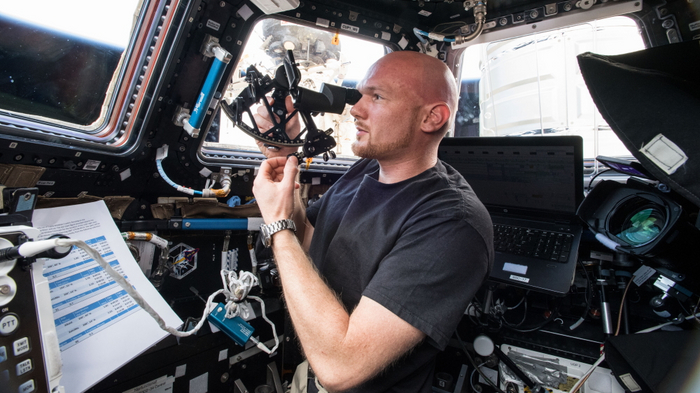
Астронавт Александр Герст проводит эксперименты по навигации в космосе с секстантом, фото NASA
Основы
Для того, чтобы был понятны смысл выполняемых маневров и изображенные на графиках траектории, нужно коротко объяснить основы орбитального сближения и стыковки. Для простоты в примерах ниже орбиты круговые.
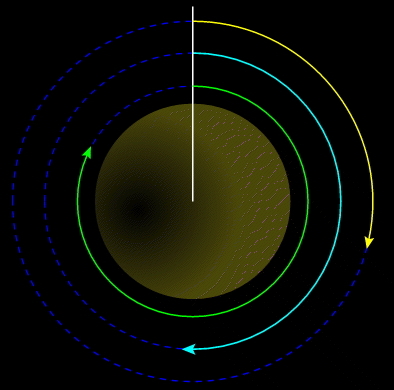
Прежде всего, чем ниже орбита космического аппарата, тем быстрее он пролетает виток. Причем аналогия с машинами, двигающимися по кольцевым московским улицам, Садовому кольцу, МКАД и ТТК будет некорректна, аппарат на низкой орбите не только пролетает меньшее расстояние за виток, но и движется быстрее. Физически правильная аналогия — шарики, катающиеся по натянутой ткани с грузиком-планетой. Главное следствие из этого для задач сближения и стыковки очень простое — чтобы догонять цель на орбите надо быть ниже, чтобы отставать — выше.
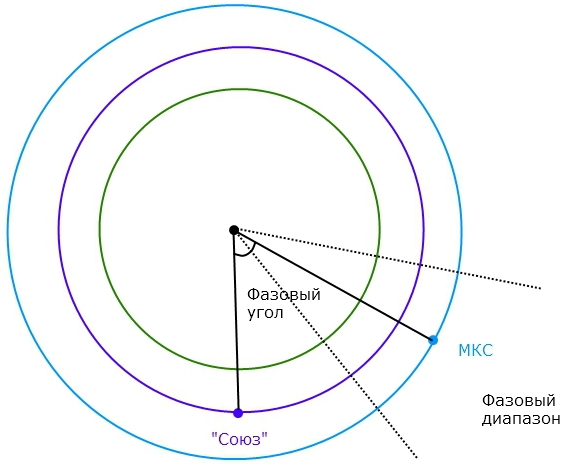
Несколько важных терминов связано с понятием «фазовый». Фазовый угол — угол между направлениями на два аппарата из центра, вокруг которого они вращаются, например, орбитальной станцией и кораблем, который к ней летит. Фазовый диапазон — допустимые значения фазовых углов. Орбита фазирования — на ней получают нужные значения фазового угла.
Общий принцип сближения для последующей стыковки прост — активный корабль стартует в нужный момент, чтобы по окончании выведения оказаться в плоскости орбиты цели и получить требуемое значение фазового угла. Затем догоняет цель по более низкой орбите фазирования и в нужный момент дает импульс, который приведет его близко к цели. Затем уже у цели выдается импульс, который уменьшает относительную скорость, и можно переходить к финальному сближению и стыковке. Но самое интересное скрывается в деталях — разные страны и поколения космических баллистиков создали очень разные реализации этого вроде бы простого алгоритма.
«Джемини» и секстант
«В надежде, что эта работа может помочь им в освоении космоса, она посвящается настоящим и будущим экипажам космических кораблей моей страны. О если бы я мог присоединиться к ним в их захватывающих начинаниях!»
Такое посвящение написал Базз Олдрин к своей диссертации «Визуальные техники наведения для ручного сближения». На момент защиты он провалил отбор во второй отряд астронавтов и еще не знал, что попадет в третий отряд и в итоге станет вторым человеком на Луне. Еще один малоизвестный факт — именно предложенный Олдрином подход в итоге и использовали на «Джемини».
Какие варианты сближения успели придумать до начала полетов?
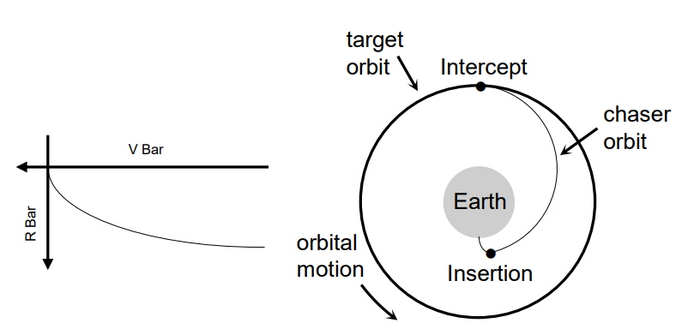
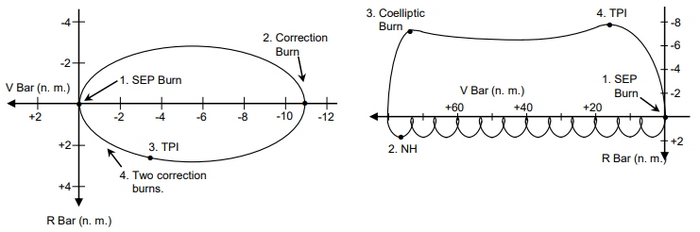
Слева относительное движение, мишень в центре, тонкая линия — траектория активного корабля. Справа — то же самое, но в абсолютных координатах
Вариант для идеального мира — сразу на выведении ракета отправляет на траекторию перехвата цели. В реальной жизни любая задержка, авария, неточность приведет к траектории, которая пройдет мимо цели, и ни времени ни возможности исправить ситуацию уже не будет.
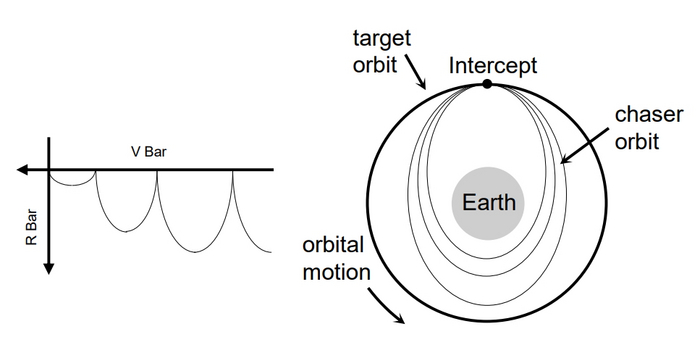
А этот вариант знаком всем, кто пытался сближаться и стыковаться в KSP, Orbiter или других симуляторах. Активный корабль выходит на орбиту фазирования, которая в одной точке касается орбиты цели. Затем, управляя высотой перицентра (нижней точки) эллиптической орбиты, задается период обращения, чтобы после очередного витка оказаться очень близко к цели. Концепция проста, но имеет свои недостатки — небольшая ошибка в финальном маневре может привести к промаху или неудобному ракурсу сближения. Такую ошибку будет сложно заметить и еще сложнее исправить, а, когда встреча через виток, ~90 минут, даже очень маленькая ошибка может в итоге стать заметной.
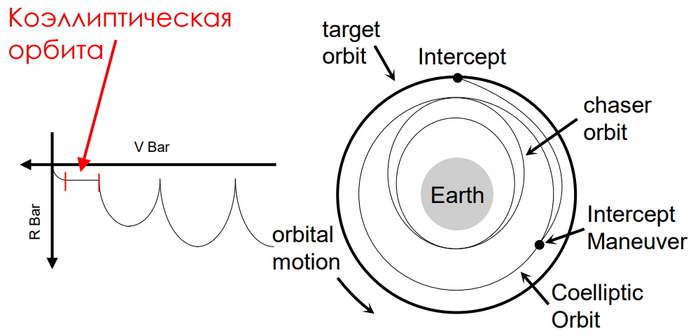
Олдрин в своей диссертации предложил то, что назвал орбитой ожидания, а сейчас это называют коэллиптической орбитой. Активный корабль после выведения и предварительного фазирования выходит на орбиту, которая имеет постоянную разницу высоты с целью. Ее плюс — в относительных координатах она выглядит как прямая линия, и расстояние до цели уменьшается с примерно постоянной скоростью. В определенных пределах длительностью нахождения на коэллиптической орбите можно управлять, чтобы сближаться в удобных условиях освещения. Для «Джемини» в итоге выбрали орбиту, которая на 28 км (15 миль) ниже.
Источник
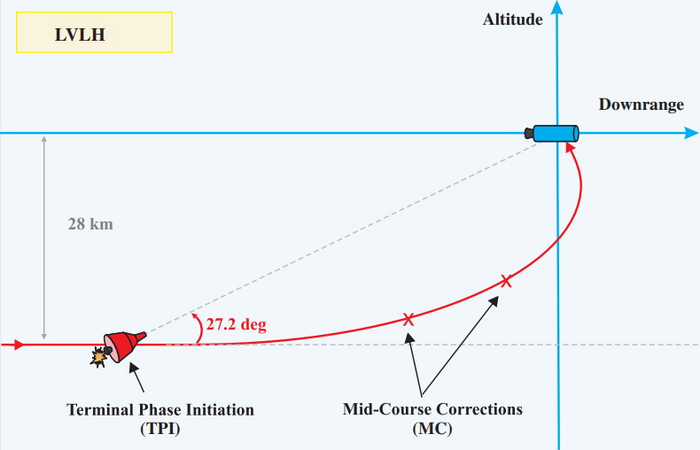
Затем, когда высота цели над местным горизонтом составит 27,2°, производится маневр перехода на траекторию сближения. Важно — он выполняется по вектору, направленному на цель (развернув корабль носом на нее). Это не Гоманов переход, не самый экономный маневр, но он имеет множество плюсов. За время сближения есть две точки, когда можно обнаружить и исправить возможные ошибки. Корабль подходит к цели снизу, и она хорошо видна на фоне неба. И, главное, маневр выполняется в зоне видимости цели и может быть выполнен вручную с использованием резервных инструментов. Как это выглядит в динамике, можно посмотреть в симуляторе Orbiter.
Первая, упрощенная, попытка сближения, была предпринята уже на «Джемини-4» — астронавты должны были подойти к верхней ступени ракеты-носителя «Титан-2», которая вывела корабль на орбиту, и после отделения находилась совсем рядом. Однако из-за недостаточной тренировки этого сделать не получилось. Главной задачей «Джемини-4» был первый американский выход в открытый космос, который прошел в целом успешно. На «Джемини-5» попытку сближения с мишенью, которую везли с собой прикрепленной к кораблю, отменили из-за аварии в системе электропитания корабля. Из-за аварии при выведении мишени Agena Target Vehicle для «Джемини-6А» в качестве цели выбрали уже находящийся в космосе «Джемини-7». Получилось — за три витка активный корабль благополучно сблизился с целью и заснял шикарные кадры.
На «Джемини-8» удалось совершить первую в истории стыковку, но из-за случившейся сразу после аварии каких-то дополнительных экспериментов не проводили. А вот на “Джемини-9А” состыковаться не получилось из-за того, что на мишени не отделился головной обтекатель. Тем не менее, астронавты благополучно провели эксперименты с «футбольной» равнопериодической орбитой, а также ушли по орбите вперед и выполнили маневр сближения с противоположной стороны, сверху и спереди. Тогда же впервые использовали секстант для определения углового положения мишени.
«Футбольная» орбита слева
На «Джемини-11» успешно провели сближение за один виток и проверили «стабильную» орбиту. После отделения корабля от второй ступени выполнили первую коррекцию, на 23 минуте совместили орбитальные плоскости, на 35 минуте мишень увидел радар и на 50 минуте выполнили переход на траекторию сближения. Спустя 88 минут после старта корабль был уже около мишени «Аджена». Стабильной назвали орбиту, когда корабль летит по той же орбите за мишенью. В этом случае можно долго находиться на фиксированном расстоянии до цели и выполнить маневр сближения, когда это наиболее удобно.
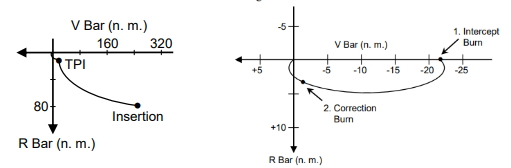
Сближение за один виток (слева) и переход к цели из неподвижного висения на стабильной орбите
Но самая яркая история случилась на «Джемини-12», где, вот совпадение, летел Базз Олдрин. Бортовой радиолокатор корабля благополучно захватил мишень «Аджена» на расстоянии 436 км, но перестал ее видеть на 119 км. Баззу пришлось вспомнить свою диссертацию, достать хранящийся на всякий случай секстант и сближаться вручную. Получилось!

Базз Олдрин (слева) с секстантом в руках и командир корабля Джим Лоувелл
На плечах гигантов
Вопрос «Как же лунные модули «Аполлонов» могли, стартовав с Луны, найти командный модуль на орбите?» имеет очень простой ответ — так же, как это уже было отработано на «Джемини». На 11 и 12 «Аполлонах» лунный модуль стартовал в нужный момент времени, выходил на круговую орбиту позади командного модуля, выполнял маневр коррекции плоскости орбиты и переходил на уже знакомую вам коэллиптическую орбиту на те же 28 км (15 миль) ниже командного модуля. Затем, когда высота командного модуля составляла 26,6°, выполнялся переход на траекторию сближения.
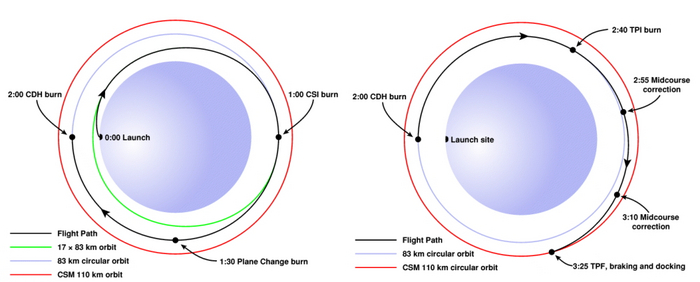
Полет в абсолютных координатах. 0:00 — старт и выход на орбиту 17х83 км, 1:00 — маневр перехода на круговую орбиту высотой 83 км, 1:30 — совмещение орбитальных плоскостей, 2:00 — переход на коэллиптическую орбиту, 2:40 — переход на траекторию сближения, 2:55 и 3:10 — коррекции, 3:25 — торможение и стыковка. Источник
На «Аполлонах» 14-17 использовали быструю схему, которую проверили на «Джемини-11», и выходили сразу на траекторию, финальная точка которой совпадала с началом сближения.
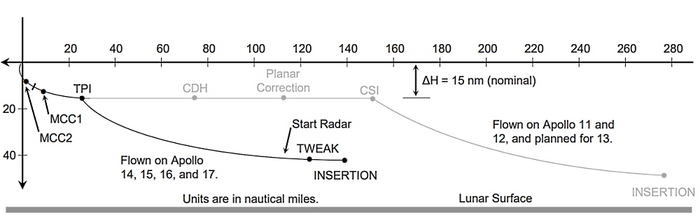
Наглядное сравнение обычной (светло-серый) и быстрой схемы в относительных координатах
И, в общем, с этими траекториями особых проблем не было. Неприятность случилась там, где не ждали. На «Аполлоне-16» командный модуль должен был выйти на орбиту 15х110 км, отделить лунный модуль и перейти на круговую орбиту встречи высотой 110 км. Однако последний пункт выполнить не получилось из-за внезапной проблемы с приводом, поворачивающим маршевый двигатель служебного модуля. Принятое за неделю до этого правило безопасности говорило, что отказ любого из четырех приводов маршевого двигателя запрещает скругление орбиты и высадку на поверхность, лунный модуль должен подойти к командному, состыковаться, и астронавты, несолоно хлебавши, должны отправиться на Землю. На то, чтобы разобраться в ситуации, было примерно 10 часов, затем плоскость орбиты модулей оказывалась слишком далеко от района посадки. ЦУП принял решение, чтобы лунный модуль (ЛМ) подошел к командному (КМ). И тут начались неприятности — при выполнении маневра сближения пилот КМ Томас Маттингли заметил, что он тормозит, а расстояние до ЛМ не начинает уменьшаться. Подумав, он включил двигатели ориентации еще раз и убрал выданное изменение скорости — когда у тебя перицентр 15 км уменьшать его, тормозя, опасно. Так что когда модули вышли из тени Луны, ЦУП осознал наличие еще одной проблемы — относительное движение модулей определено неверно, и КМ не находится на «футбольной» орбите, которая сама через виток должна доставить КМ близко к ЛМ. По бортовым данным КМ перицентр орбиты составлял 11,6 км, а по данным ЦУПа — 16,6 км. Когда оба модуля подошли к району перицентра, астронавты при помощи ЦУПа начали выполнять сближение методом грубой силы — направив КМ в сторону ЛМ и вручную убирая постоянно возникающие боковые скорости. История закончилась хорошо — модули сблизились благополучно, на 16 витке ЦУП разрешил спуск на поверхность. Посадка, взлет, встреча на орбите и полет домой прошли без серьезных происшествий.
По эту сторону океана
В СССР связанный со сближением пиар и троллинг устроили еще в 1962 году. Корабль «Восток-4» был запущен ровно сутки спустя после старта «Востока-3» и был выведен на близкую орбиту. Космонавты Андриян Николаев и Павел Попович видели корабли друг друга и вели прямую связь. Но на «Востоках» не было двигателей для маневрирования, поэтому неизбежная небольшая разница орбит постепенно увеличивала расстояние.
Первым советским кораблем, который мог маневрировать на орбите, стал «Союз». Но подход советских инженеров очень сильно отличался от американского. Расчеты для рандеву выполнялись на Земле, корабли выполняли маневры, чтобы оказаться на расстоянии менее 30 км друг от друга, а дальше в дело вступала автоматика. При помощи обзорных антенн активный и пассивный корабли определяли положение относительно друг друга и оба разворачивались стыковочными узлами один к другому. Затем, определяя относительную скорость при помощи радиосигналов, активный аппарат подходил методом «грубой силы» — разгонялся в направлении пассивного, разворачивался, гася боковые скорости (при этом его гиростабилизированная антенна сопровождала пассивный корабль), тормозил и в финале подходил к стыковочному узлу.
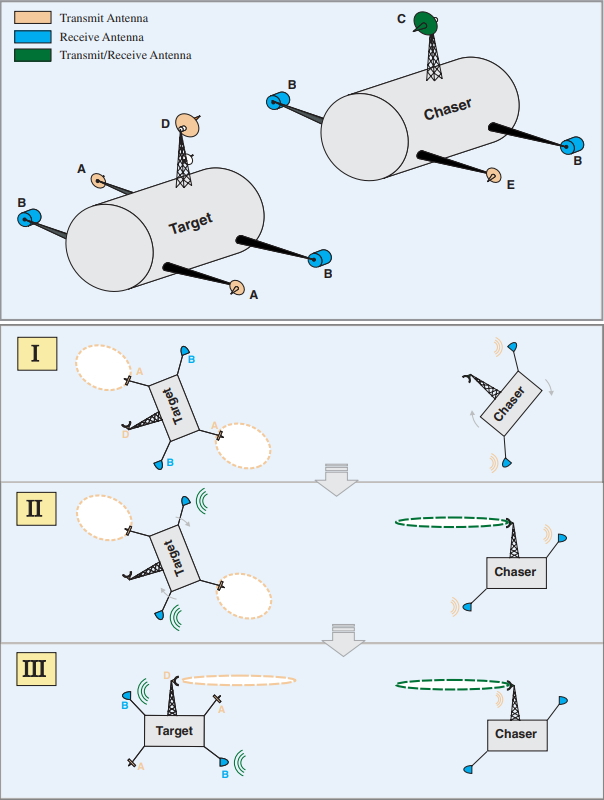
Антенны системы “Игла” и принцип работы, источник
На первых полетах расстояние для срабатывания «Иглы» обеспечивалось выведением без предварительного сближения — после отделения от последней ступени ракеты-носителя корабль оказывался сразу в районе цели. Реализуемость идеи продемонстрировали беспилотные «Союзы», обозначенные как «Космос-186» и «Космос-188», совершившие 30 октября 1967 первую в истории автоматическую стыковку.
Похожий подход попытались выполнить на «Союзе-3», но там из-за сочетания недостатков планирования, подготовки и ошибок космонавта получилось автоматическое дальнее сближение, но не удалось вручную подойти к пассивному кораблю и состыковаться. На «Союзах» 4 и 5 уже стыковались через сутки, для чего корректировали орбиту по передаваемым из ЦУПа уставкам.
Любопытная деталь — автономность сближения и невозможность быстро расшифровать телеметрию приводила к тому, что в ЦУПе знали только общую логику сближения и первые годы хватались за сердце, когда корабль, по ощущениям, слишком долго выполнял маневр или сближался без торможения.
Принятый в СССР подход имел серьезный недостаток — баллистики могли вывести корабль к цели до расстояния в несколько километров, а космонавты — состыковаться вручную с расстояния примерно сто метров. Но в случае отказа радиотехнической системы не было запасного ручного способа подойти от нескольких километров до сотни метров. По этой причине сорвались стыковки «Союзов» 7 и 8, «Союза-15» к станции «Салют-3», «Союза-23» к станции «Салют-5» и даже в 83 году, когда «Союз Т-8» не смог пристыковаться к станции «Салют-7». «Союз Т-8» стал последней каплей, после которой решили начать разрабатывать алгоритмы ручного дальнего сближения. Наработки очень пригодились в 1985 году, когда оказалась полностью обесточена станция «Салют-7» и к ней отправился корабль «Союз Т-13». Баллистики смогли подвести корабль на 5 км к станции, после чего космонавты Джанибеков и Савиных сближались вручную, используя лазерный дальномер, калькулятор и графические шаблоны с предварительно рассчитанными диапазонами расстояний и скоростей. Затем эти же наработки пригодились на уникальном полете «Союз Т-15», где перелетали от станции «Мир» к «Салюту-7» и обратно. На «Салюте-7» к тому времени сломалась «Игла» на свободном стыковочном порту, так что пришлось использовать дальномер.
Новые ограничения новой техники
Когда Space Shuttle еще только создавался, было ясно, что ему придется стыковаться со спутниками для обслуживания их на орбите, а в будущем и с орбитальными станциями. Так что уже в 70-х вовсю велись дискуссии о лучшем способе сближения. Принятый в 1973 году профиль из двух коэллиптических орбит быстро стал терять привлекательность из-за своей негибкости.

Изначально предложенный вариант сближения с двумя коэллиптическими орбитами
Еще одной потенциальной проблемой стали опасения, что при финальном торможении у цели шаттл останется без запасов топлива в носовых двигателях ориентации — переход с коэллиптической орбиты приводил к довольно высокой относительной скорости у цели. Какое-то время рассматривался модифицированный вариант с коэллиптической орбитой не на 18 км ниже, а всего на 4,6, но у него проявились свои недостатки. В итоге был принят вариант со стабильной орбитой, проверенной на «Джемини-11». Вне зависимости от того, с какой стороны подходил шаттл, он прицеливался в точку в 15 км позади цели на той же высоте. В теории можно было бы, выполнив маневр, перейти на ту же орбиту, что и цель, и находиться на ней сколько угодно долго, сохраняя постоянное расстояние 15 км за целью, но была принята другая концепция — если все было в порядке, шаттл выполнял маневр Ti для перехода к цели, либо, если были какие-то проблемы, переходил на равнопериодическую «футбольную» орбиту и описывал эллипсы в стороне от цели.
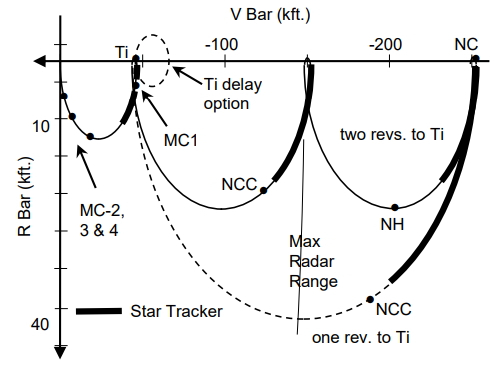
Варианты со сближением за 2 или 3 витка
Другие ограничения могли быть связаны с выхлопом маневровых двигателей шаттла, который не должен был попадать на цель. По этой причине основными стали два варианта финального сближения — по вертикальной или горизонтальной осям. В этом случае, благодаря орбитальной механике, импульсы двигателями надо было делать вбок.
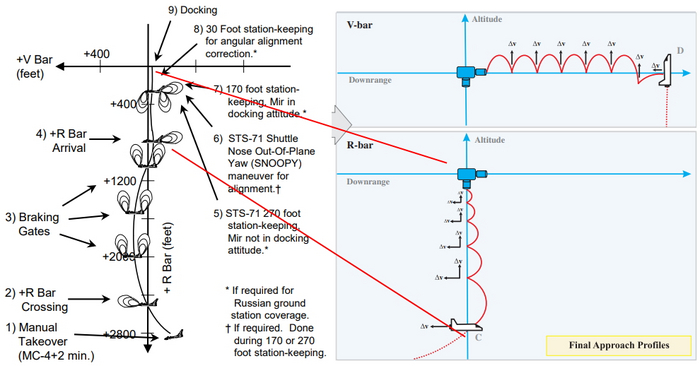
В 1997 году приняли модифицированный вариант стабильной орбиты, еще более удобный и позволяющий экономить еще больше топлива, а после катастрофы «Колумбии» добавили маневр кувырка на финальном сближении.
Знакомые траектории новых кораблей
Теперь вы уже умеете читать траектории кораблей, и для вас совершенно ясно, как, например, сближается Crew Dragon с МКС.
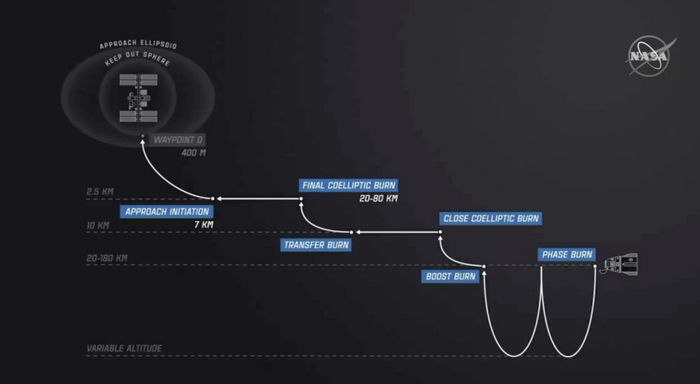
На схеме отлично видны и даже подписаны две коэллиптические орбиты, значит Crew Dragon сближается по модифицированной траектории, которая когда-то предлагалась для шаттлов. Разница высоты второй коэллиптической орбиты составляет всего 2,5 км, это гарантирует низкие относительные скорости.
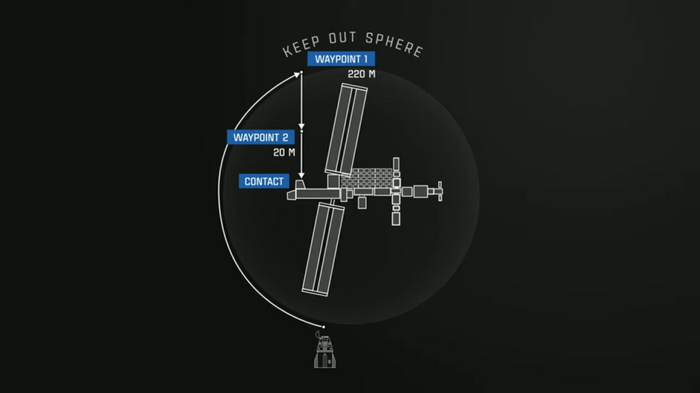
Траектория финального сближения связана с виртуальной сферой, которая окружает МКС, и в нее можно заходить только для непосредственно стыковки. Поэтому, когда точка прицеливания лежит ниже станции, а стыковаться нужно, как, например, в случае Crew 4, к зенитному (верхнему) узлу модуля Harmony, то запретную зону придется облетать.
У Boeing Starliner очень похожая траектория, но переход на вторую коэллиптическую орбиту производится с проходом под станцией и уходом назад, а разница высот второй коэллиптической орбиты составляет 5 км.
Быстрее и быстрее
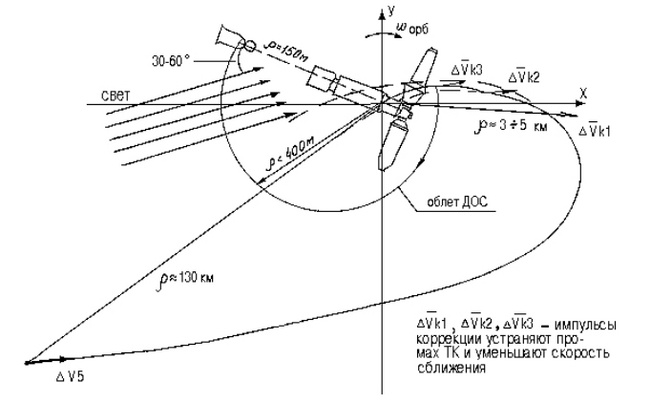
В СССР новая система «Курс» на смену «Игле» появилась в 1986 году. Она уже позволяла более продвинутые траектории сближения и не требовала разворота станции навстречу кораблю. Скорее всего, вы слышали про мем “In Soviet Russia все наоборот”. Забавно, но он работает в орбитальном сближении — на «Союзах» коэллиптическая орбита используется перед орбитами фазирования, а не после, как на Западе. А финальный переход немного похож на идею из диссертации Олдрина — когда высота станции над горизонтом составляет 23°, корабль выполняет маневр перехода на траекторию финального сближения. Но он выполняется в направлении не на станцию, а по вектору орбитальной скорости, т.е. это более экономный Гоманов переход и встреча состоится через пол-витка.
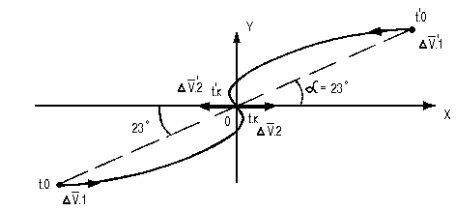
Траектория перехода в относительных координатах, t’0 — симметричная траектория, для сближения сверху и спереди, источник
Во время финального сближения «Курс» позволяет в автоматическом режиме производить сложные облеты станции от точки прицеливания к оси стыковочного узла.
В том же 1986 году была выведена станция «Мир» и для нее перевели «Союзы» от суточной схемы к двухсуточной. Во времена «Салютов» стыковка через сутки диктовалась удобством зон связи. Станция «Мир» должна была расширяться новыми модулями, и маневрировать ей для формирования нужного фазового угла становилось бы все более накладно. А двухсуточная схема имела очень большой диапазон возможных фазовых углов, целых 150°. Однако она была дискомфортна для людей. Прошли годы. Космонавты терпеть приучены, а вот начавшим летать к МКС космическим туристам было плохо. Для того, чтобы сделать полет к МКС комфортнее российские баллистики задумались о более коротких схемах. В 2012 четырехвитковую шестичасовую схему отработали на грузовых «Прогрессах», а с 2013 года стали применять на пилотируемых кораблях.
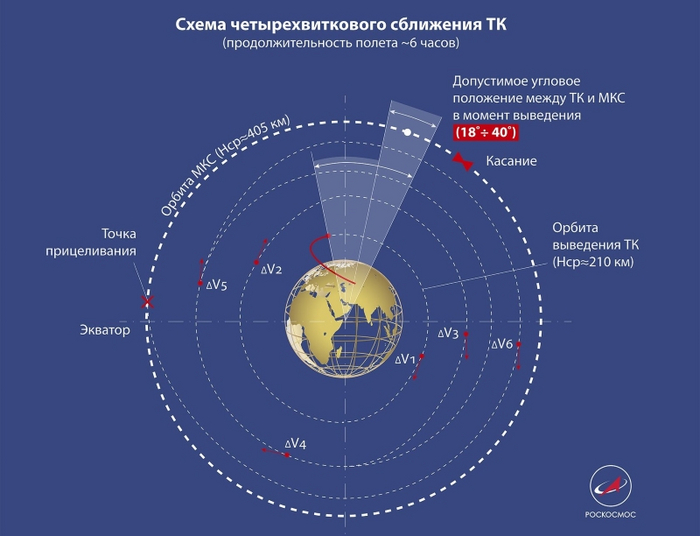
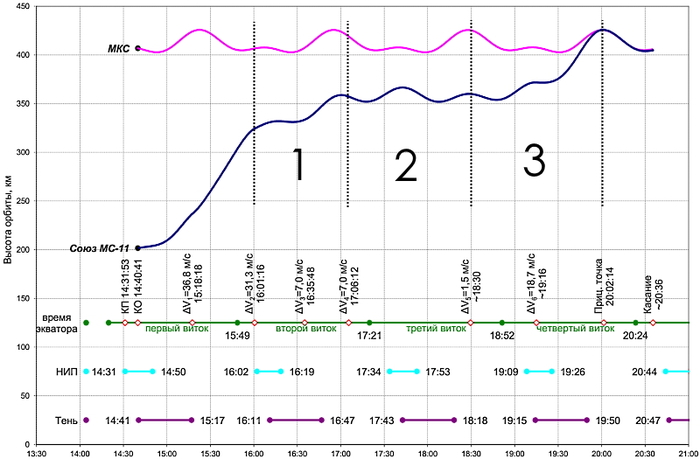
Еще один вариант представления орбит, по высоте над поверхностью со временем. Полет «Союз МС-11». Участок 1 очень похож на коэллиптическую орбиту, 2 — орбита фазирования, 3 — биэллиптический переход к станции за три импульса, высота 23° в районе △V6. Источник
Но четыре витка не предел. После тестов на грузовиках с 2018 года, корабль «Союз МС-17» долетел до МКС за два витка или три часа.
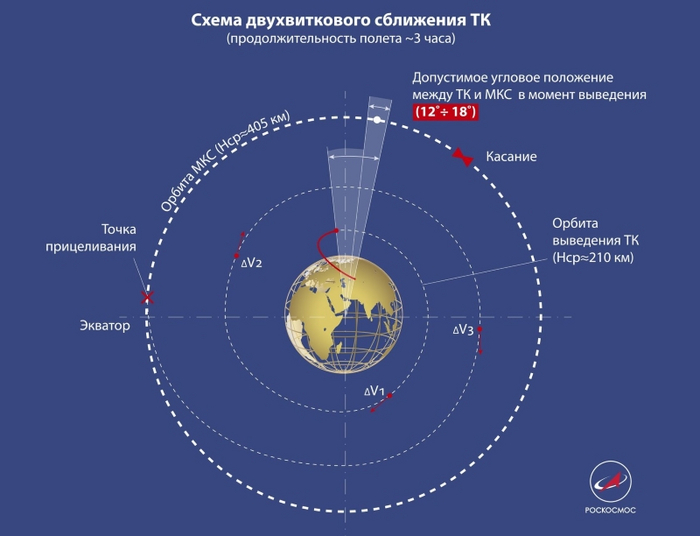
Обратите внимание, насколько стал меньше допустимый диапазон фазовых углов
Но и это еще не все. Сейчас ведется подготовка к одновитковой схеме. После выведения корабль перейдет на коэллиптическую орбиту и, когда высота станции над горизонтом составит 23°, выполнит маневр перехода на траекторию к МКС. Здесь будет еще сложнее, фазовый диапазон составит всего-то 1°. Но у баллистиков есть хак — можно выйти на совсем немного отличающуюся плоскость орбиты, и за счет этих маневров расширить допустимый фазовый диапазон.
Развитие баллистики не остановилось, наоборот — сейчас аппараты летают по все более сложным орбитам. И уже в этом десятилетии нас должно ждать увлекательное зрелище — смотреть, по какой траектории посадочный модуль HLS на базе Starship будет сближаться со станцией Gateway на почти прямолинейной гало-орбите Луны.
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!
Пожалуй, нет на свете ни одного другого праздника, который менял бы собственную дату столь же часто, как этот. Сегодня мы отмечаем День программиста — профессиональный праздник всех тех специалистов, без которых любое компьютерное «железо» навсегда останется мертвым и безжизненным. Хотя стоп! Почему именно сегодня?
Долгое время программисты попросту не имели своего профессионального дня и отмечали те праздники, которые хоть как-то были связаны с их работой. Так, еще несколько десятилетий назад они собирались на 14 февраля, но вовсе не ради того, чтобы поздравить с Днем Всех Влюбленных своих вторых половинок. Именно 14 февраля 1946 года в США была создана вычислительная машина общего назначения ENIAC, подходящая для решения самых разных задач.
На этом 30-тонном агрегате рассчитывали прогноз погоды, получали значения чисел π и e с точностью до 2000 знаков после запятой, решали проблему обтекания воздухом крыла самолета – все это делалось в перерывах между бесконечной сменой перегоревших ламп и перфокарт. Тем не менее, для того времени машина оказалась весьма полезной, а ее нерасторопность лишь подстегнула инженеров продолжить разработки. Примечательно также, что команда первых программистов ENIAC состояла исключительно из представительниц прекрасного пола: программистами-операторами компьютера были Джин Бартик, Бетти Холбертон, Кей Антонелли, Марлин Мельцер, Френсис Спенс и Рут Тейтельбаум.

Еще одной датой неофициального праздника было 10 декабря, так как в этот день родилась Ада Лавлейс, первая женщина-программист в мире. Ее отцом был известный поэт Байрон, и мать девочки, боясь, что она пойдет по стопам отца, заставила ее учиться на математика. Ада прожила всего 36 лет, но внесла неоценимый вклад в историю программирования. В 1980 году по решению Министра обороны США ее именем был назван язык программирования для встроенных систем ADA. С популярностью ему повезло несколько больше, чем нашему ответу на него – языку РАЯ, который так и остался на страницах учебников информатики 90-х годов.
Следующим днем, который программисты пытались сделать праздничным, был 19 июля. Он также связан с Адой Лавлейс, а именно, с созданием ею первой в мире программы для аналитической машины, придуманной ее другом математиком Чарлзом Бэббиджем. Всего для этой машины она разработала 3 программы, которые могли похвастаться необычайной точностью, а также составила описание ее устройства и принципов работы, исправив при этом ошибку самого Бэббиджа. Также именно Ада Лавлейс открыла изобретателю глаза на то, что его машина способна работать не только с числами, но и выполнять более широкий диапазон расчетов, что делает ее отличной от арифмометра. Однако британское правительство не стало финансировать дальнейшее усовершенствование машины, хотя принято считать, что именно Бэббидж заложил теоретические основы современных программируемых компьютеров.
Последующие даты празднования Дня программиста, 4 апреля и 22 апреля, к истории никакого отношения не имели, а были выбраны исключительно из-за цифрового совпадения: в честь ошибки 404 и кода 220400, которым ранее обозначалась специальность «Программное обеспечение вычислительной техники и автоматизированных систем». Кстати, в актуальной классификации данная специальность обозначается кодом 230105.65 – означает ли это, что программисты могут отмечать свой профессиональный праздник еще и 23 января?
В конце концов отмечать все эти праздничные даты программисты, видимо, устали, и решились на отчаянный шаг: обратились в Администрацию Президента с целью признания праздника на государственном уровне. Инициаторами выступили сотрудники веб-студии «Параллельные технологии» Михаил Червяков и Валентин Балт. В успех дела они верили слабо, но собрали подписи в его поддержку и назначили дату – 13 сентября (или 12 сентября, если год високосный). Причина, по которой был выбран именно этот день, вполне очевидна — но только для айтишников. По задумке Червякова и Балта, праздничным считается 256-й день года, поскольку именно такое количество чисел можно выразить при помощи 8-разрядного байта.
И вот через 7 лет, 24 июля 2009 года, вышел проект указа об официальном признании Дня программиста, а 11 сентября того же года его подписал находившийся в то время на посту Президента РФ Дмитрий Медведев. Сейчас праздник имеет международный формат, и 13 сентября отмечается во всех странах мира, кроме Китая. Там предпочтение отдали другой дате – 24 октября, символизирующей число 1024 или 2 в 10 степени.
Интересный факт
Самым молодым программистом в мире был признан 6-летний Архам Ом Талсания из Индии. Ученик 2-го класса успешно сдал экзамен по Python, на изучение которого у взрослого человека уходят годы. По словам мальчика, писать код научил его отец, сам работающий с этим языком программирования. За свое достижение Архам Ом Талсания был занесен в Книгу Рекордов Гиннеса.

Пользуясь случаем, хотим искренне поздравить всех программистов с их официальным праздником и пожелать безглючного кода, легкой отладки, интересных проектов и гигабайтов вдохновения! С Днем программиста, друзья!
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!

Программисты, дизайнеры, системные администраторы, даже блогеры — пожалуй, каждый из представителей IT-индустрии имеет своей профессиональный праздник. «День тестировщика» отмечают сегодня, 9 сентября. Однако с самой этой торжественной датой дела обстоят не так просто, как кажется!
«Запустилось? Отдаем заказчику!» – именно так выглядела бы схема разработки программ, если бы в ней не участвовали тестировщики. «Нет тестировщика – нет проблем», – шутят программисты, однако без представителей этой славной профессии сегодня не обходится ни одна компания, связанная с созданием софта.
«Отцом-основателем» профессионального сообщества тестировщиков ПО принято считать американского инженера румынского происхождения, консультанта по менеджменту и академика Международной академии качества Джозефа Джурана. Именно он в 1951 году впервые отметил важность тестирования программного кода в своей книге «Руководство по контролю качества», определив 3 части управления производством программного обеспечения: его планирование, контроль и улучшение.

Джозеф Джуран
В 1957 году американский изобретатель Чарльз Л. Бейкер окончательно отделил процесс тестирования готовых к релизу программ от отладки в процессе разработки кода, а спустя еще один год ученый Джеральд М. Вайнберг впервые сформировал команду тестировщиков ПО для проекта Mercury – первой американской национальной программы по подготовке полета человека в космос.
С тех пор связанная с тестированием программ терминология развивалась, менялась и дополнялась, пока не была четко сформулирована в книге «Искусство тестирования программного обеспечения» Гленфорда Дж. Майерса в 1979 году. Именно это издание, переведенное на несколько языков и выходившее во многих странах, в том числе, в СССР, сегодня считается одной из фундаментальных работ в области тестирования софта.

Книга Гленфорда Дж. Майерса издавалась даже в СССР
Историю со злополучным мотыльком, которого обнаружила в контактах компьютера Mark II легендарная Грейс Хоппер, знают, наверное, все. Произошло это знаменательное событие как раз 9 сентября далекого 1947 года в 15:45, о чем Хоппер сделала соответствующую запись в техническом журнале: «First actual case of bug being found». В этот же журнал, который теперь хранится в Смитсонианском национальном музее американской истории в Вашингтоне, Грейс вклеила того самого мотылька, вызвавшего сбой в компьютере. Таким образом несчастное насекомое было увековечено для грядущих поколений потомков, а 9 сентября стало общепризнанной датой обнаружения перового компьютерного «бага».
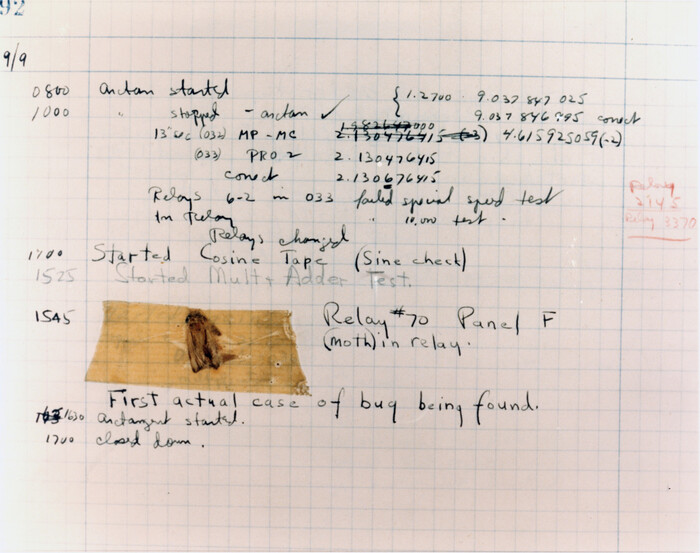
Та самая страница из технического журнала от 9 сентября 1947 года
Но оказывается, не все так просто. Если погрузиться чуть глубже в историю, всплывает еще одна занимательная теория, которая гласит: задолго до Грейс Хоппер словечко «bug» в том же самом значении использовал изобретатель лампы накаливания Томас Эдисон.
В то время он занимался совершенствованием телефонной связи в Western Union, которая стремилась составить конкуренцию новой коммуникационной компании Александра Белла. В одном из писем, адресованных президенту Western Union Уильяму Орто, Эдисон написал:
«Вы были отчасти правы, я действительно обнаружил «жука» (bug) в своем аппарате. Насекомое, по-видимому, находит условия для своего существования во всех вызывных устройствах телефонных аппаратов».

То самое письмо Эдиссона
Это письмо, переданное в Нью-Йоркский аукционный дом Swann Galleries, является одним из самых ранних примеров использования термина «баг» для описания технической проблемы. Эдисон начал применять этот термин в 1870-х годах, когда работал над квадруплексным телеграфом, для правильной работы которого даже встроил в корпус специальную «ловушку для жуков», поскольку привлеченные теплом насекомые очень любили забираться в корпус устройства и замыкать контакты.
К 1878 году словечко уже прочно вошло в лексикон ученого: Эдисон часто использовал его в записных книжках и нередко произносил за пределами своей лаборатории. Следовательно, 9 сентября – возможно, вовсе не аутентичная дата для профессионального праздника тестировщиков, и этот вопрос требует дополнительного исторического расследования.
Несмотря на то, что День тестировщика сегодня на слуху у всех представителей IT-индустрии, в России праздник как-то по-особенному не отмечается. Вот что говорят об этой дате сами представители профессии:
«День тестировщика? Я вас умоляю, у нас на День Рождения людям говорят «С др», и это считается нормой.»
«Праздник – это когда у тебя база данных не ложится в ночь с субботы на воскресенье. А вы тут про День тестировщика...»
«Как мы отмечаем День тестировщика? Купаемся в фонтанах, рассказываем байки про былые баги и пристаем к прохожим с вопросами типа «А у тебя баг-трекер какой версии?» и орем «ЗА ТЕСТЛИНК! Ну а если серьезно – максимум в баре можем собраться или дома с семьей.»

Тестировщики купаются в фонтане и ищут, кому бы набить джиру. Фреска, XV век
Однако некоторые крупные IT-компании стараются не обходить этот день стороной и устраивают для своих сотрудников различные увеселительные мероприятия. Хотя этот день принято считать международным праздником, за рубежом по его поводу громких мероприятий также не проводится. Тем не менее представители этой славной профессии не унывают и сами устраивают себе праздник с дружескими посиделками и тестированием разных сортов пива.
Как бы то ни было, без тестировщиков, или, как говорят некоторые продвинутые HR-ы, «инженеров по тестированию», современная IT-индустрия просто не может существовать. Поздравляем тестировщиков и всех причастных с профессиональным праздником и желаем, чтобы от вашего внимания не ускользнул ни один, даже самый хитрый баг! Пользуясь случаем, приглашаем представителей этой славной профессии поделиться в комментариях, как вы отмечаете этот праздник.
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
В этих известных постулатах Азимова ощущалась некоторая неполнота, и поэтому в 1986 году в романе «Роботы и Империя» (англ. Robots and Empire) он предложил Нулевой Закон:
0. Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинён вред.
За синтетов так никто не заступился, и в следующем году в мир роботов пришло Зло. Их научили причинять вред друг другу.
В середине восьмидесятых инженер Билл Ллевеллин (Bill Llewellyn) и его товарищи-единомышленники организовали Denver Mad Scientist Club – Клуб Безумных Ученых Денвера. Прекрасное название для группы людей, действительно повернутых на науке. И вот, жилось им спокойно пока на одном из своих мероприятий они не решили организовать оно маленькое соревнование. Сконструированные людьми автономные роботы должны были проходить простую трассу. Вроде как ничего сложного, да? Эта своеобразная гонка получила название «Critter Crawl» (Ползание тварей) и была встречена с огромным интересом.
Впоследствии Билл вспоминал, что после мероприятия к нему подходили разные люди и говорили, что несмотря на то, каким крутым было событие само по себе, было бы гораздо круче, если бы роботы на самом деле сражались друг с другом (ох уж эти люди с их кровожадностью).
Идея пришлась по вкусу. И уже в 1987 году Ллевеллин и его коллеги-товарищи разработали свод правил для роботов, управляемых через кабели или радио-контроллеры и организовали «Critter Crunch» (опять же, от слов «Тварь» и «Хруст» или «Скрип») на съезде MileHiCon, посвященном научной фантастике. Конечно не так, наверное, себе представляли участники фестиваля посвященному Sci-Fi тематике битву роботов. Но, как говорится, это было только начало, и оно, то бишь начало, было положено.
С тех пор «Critter Crunch» проводится на MileHiCon каждый год, что делает этот турнир самым старым и одновременно самым долгоиграющим в индустрии боев роботов.
И закрутилось. В 1991 году судьба совершила странный поворот, когда ди джей по имени Келли Локхарт, побывавший на таких соревнованиях, привез председателю съезда «Dragon*Con», другой Sci-Fi конвенции, копию правил, написанных Биллом и его друзьями. Темой обсуждения была возможность проведения подобных соревнований у них, в Атланте. В общем, им тоже захотелось увидеть у себя боевые машины. Правила были перепечатаны и опубликованы в буклете съезда, площадка возле погрузочных доков отеля, в котором проводилась конвенция, выделена. Дело осталось за малым – дождаться участников. И они появились -целых двое! Даже жеребьевку проводить не пришлось. И они бились до тех пор, пока один из ботов не перестал функционировать. Даже при таком количестве участников зрителей набралось немало, и многие из них вернулись в следующем году уже со своими ботами. Так зародились «Robot Battles» – «Битвы роботов».
В 1994 году организаторы даже пригласили Марка Торпа (Marc Thorpe), создателя и организатора «Robot Wars» – боев роботов, проводившихся в Сан-Франциско, а в последствии и телешоу с одноименным названием, которое транслировалось на американском телевидении с 1998 по 2004 и с 2016 по 2018. Торп провел турнир роботов вместе с Локхартом и настолько впечатлился энтузиазмом, с которым «Dragon*Con» организовали это мероприятие, что вернулся в Атланту и на следующий год, чтобы повторить.
Очень сильно подстегнуло развитие и популярность «Robot Battles» шоу «Battlebots» дебютировавшее на телевидении в 2000 году. В результате чего «Battles» добавили в правила разделение по весовым категориям и кинули клич по школам и университетам, чтобы привлечь к соревнованиям молодых энтузиастов. Это был успех.
Олимпийские игры
А между тем, на декаду ранее, осенью 1990 года в в городе Глазго, расположенного в Шотландии, состоялись первые в мире Олимпийские игры роботов. Проводились они в институте Тьюринга и заявлялись в информационной бюллетени от BMVA News, как событие невиданных ранее масштабов. По плану роботы из США, Японии, Канады и СССР должны были прибыть в Глазго, на мероприятие, которое откроют проносом олимпийского огня. Анонсировалось, что в 9 утра 27 сентября Trolleyman – балансирующий двухколесный робот, больше похожий на тележку для гольфа, пронесет олимпийский факел по улицам Глазго в сторону университета Стратклайда (University of Strathclyde).
В программе игр были заявлены парад роботов, пресс-конференция, демонстрация роботов-спортсменов, совмещенная с семинаром «будущее интеллектуальных роботов». Семинар имел своей целью осветить актуальные проблемы продвинутых роботов, в том числе сложности в производстве роботов, связанные с получением адекватного ответа от датчиков восприятия.
В 10 утра следующего дня должны были начаться основные события, перед которыми организаторами планировалось осмотреть участников будущего соревнования и распределить их по разным видам активностей соответственно с их конфигурацией. Планировалось проводить забеги (для роботов, обладающих двумя или четырьмя конечностями, колесами, гусеницами), задания на избежание столкновений, определение лучших навыков речевого общения, такие конкурсы как плаванье и лазанье по стенам.
Помимо традиционных медалей победителям предполагалось выбрать абсолютного чемпиона. Судейская коллегия должна была решить, кому присудить это звание на основании трех характеристик:
1. Качество аппаратного обеспечения (инженерия и электроника).
2. Общая сложность и вариативность поведения.
3. Новизна концепции.
Ожидалось, что в последствии олимпийские игры роботов будут проводиться каждые два года, чередуя Глазго и другие города по всему миру.

Олимпийский факел и флаги стран участников
Но, в теории все оказалось, как всегда, лучше, чем на практике. Множественные публикации журналистов, побывавших на мероприятии, освещают его совсем с другой стороны.
Так, Дэвид Бакли в своей заметке, опубликованной после того, как он сам участвовал в этом событии, отметил, что соревнования были очень сложными для настоящих роботов и совершенно непродуманными. Например, в соревнованиях по ходьбе не было ограничения по размеру роботов. И было хоть и забавно, но совершенно нелепо наблюдать за тем, как машина высотой в четыре фута должна проходить ту же дистанцию, что и машина высотой в один фут.
Некоторое количество роботов вообще не работало. Заявленный изначально Trolleyman вообще не функционировал и был спрятан в углу (тем не менее в телепрограмме «Tomorrows world» появились фальшивые кадры, сделанные с его участием).
Так же Дэвид отметил, что представленные экземпляры не отличались и инновационностью. Большинство из этих роботов не могли считаться новинками в своей сфере даже десятилетие назад. Хотя, казалось бы, уровень робота должен быть эквивалентен количеству средств, вложенных в него. Но, при взгляде на некоторые экземпляры, складывалось впечатление, что их просто собрали из подручных материалов в каком-нибудь гараже или школьной лаборатории — это вне зависимости от финансирования. В общем уровень участников, за исключением нескольких, совершенно не соответствовал заявленным масштабам события.
Плюс подкачали и сами организаторы. Игры были организованы в спортзале института, пол которого был успешно скрыт традиционным выставочным ковром. И вот этот-то ковер и стал камнем преткновения для многих участников. Не рассчитанная на ворс ковра механика роботов никак не могла с ней справиться. Маленькие машины путались в ворсе, в результате чего получилась свалка. Роботы побольше, использующие навигацию на основе Dead-Reckoning, начинали сбоить из-за этих скоплений мелких объектов. А самые большие колесные роботы, казалось, были рассчитаны на передвижение только по железобетону.

Главный холл со злополучным ковром
Прибавьте к этому тот факт, что буквально каждому роботу и/или пульту от него требовалось электропитание, а вот розеток на всех не хватало. Вот уж где была настоящая битва! Так не лучше ли было бы потратить деньги, ушедшие на ковровое покрытие, для обеспечения адекватного энергоснабжения?
Складывалось ощущение какой-то халтуры. Таким же было и мнение большинства других присутствующих. Так, основатель компании «Shadow Robot» Ричард Гринхилл (Richard Greenhill) отметил, что их проект Shadow Walker, был одним из самых амбициозных, но не был полностью доделан. Несмотря на то, что на играх они продемонстрировали «костюм», с помощью которого можно было осуществлять управление роботом – Shadow Data-Suite, эта технология требовала доработки. В то время, как менее амбициозный проект, представленным Кардиффским университетом Великобритании, оказался полностью законченным – работал, ходил на двух ногах и заслужил хорошую оценку. Но и ему не были доступны повороты и другие вращательные движения.


Shadow Biped и его создатель Ричард Гринхилл. Музей Науки в Лондоне
Победитель, которому досталось звание абсолютного чемпиона – «Yamabiko», представленный университетом Цукуба, также не показал ничего такого, что не было известно в сфере робототехники последние пару декад. Забавно, что его к тому же дисквалифицировали в одном из конкурсов по причине неумения говорить на английском. Но свой хрустальный кубок он, тем не менее, заслужил.

Чемпион Первых Олимпийских игр роботов Yamabiko, со своим создателем Шоджи Сузуке и стеклянные кубки, которыми награждали призеров
С тех далеких пор соревнования роботов изменились кардинально. В наше время основной уклон в этой сфере сделан непосредственно на бои. Один на один, на выбывание, стенка на стенку – тут уж выбирайте сами. Было организовано огромное количество турниров и ТВ-шоу, таких как «BattleBots» и «Robot Wars» – самые знаменитые ТВ-шоу, транслировавшие соревнования роботов еще в девяностых и ранних двухтысячных. Роботы прогрессировали в своем развитии, обзаведясь современными наворотами. Развивалось не только вооружение, собственно предназначенное для боёв, но и системы сканирования и управления. Увеличивалась маневренность машин, их скорость и автономность. И все же, как ни извращаются конструкторы ботов, трудно придумать что-то принципиально новое. Определенные виды боевых роботов присутствуют практически на каждом из проводимых турниров. Давайте познакомимся с ними поближе. Итак.
Виды боевых роботов
Клин (Wedge)

Название его, как несложно догадаться, обусловлено формой. Представляет собой робота, оснащенного в передней части наклонной плоскостью, предназначенной для того, чтобы максимально эффективно подцепить на себя противника и организовать его встречу со стеной или любым другим препятствием. Такие боты, как правило, имеют очень прочную конструкцию и уничтожить их достаточно сложно. При отсутствии другого оружия, такой бот не всегда наносит сопернику ощутимый урон. К тому же он требует высоких навыков вождения и не допускается на некоторые соревнования, которые настаивают на наличии активного оружия, чтобы матчи были более захватывающими. Ибо народ требует «Хлеба и зрелищ!». Просто представьте себе матч в котором сойдутся два таких робота – скука…
Спиннер (Spinner)

«Rainbow» — участник «BattleBots» 2019 год, Россия
Роботы оснащенные оружием, основой которого является любой вращающийся механизм. Это может быть цеп, диск, лезвие, молот, циркулярная пила или, например, кольцевая пила по всему периметру бота. Они могут быть вертикальными или горизонтальными, могут прикрывать часть корпуса или будет вращаться сама верхушка бота, давая защиту в 360°. В последнем случае любой удар по боту будет одновременно наносить урон тому, кто его нанес, если только противник не робот-клин, способный проскочить под оружием.

«Mauler», участник «Robot Wars» начала 2000-х

«Captain Shrederator» участник «Battle Bots» 2021 года.
Минусом можно считать необходимость после каждого столкновения, уворачиваться от противника пока лезвия не наберут обратно максимальную скорость вращения. К тому же имеются сложности с установкой дополнительного вооружения.
Барабан (Drum)

«Минотавр», Бразилия
Технически тоже относится к спиннерам, но как-то выбился в отдельный класс. Оснащен крупным, массивным, горизонтально расположенным цилиндрическим валом (барабаном) в передней своей части. Часто на нем располагаются крючья, шипы, зазубрины, чтобы можно было цеплять, перемалывать, разрывать и переворачивать противников. Сам вал также может отличаться по размеру: быть узким или широким, или быть самим телом робота.


«Tornado» и «Barber-Ous» участники «Robot Wars»
Определенную сложность может представлять управление таким красавцем. Инерция – это вам не шутки! Так как сам вал имеет большой вес, есть все шансы перевернуться при резком повороте. Зато, если бот сконструирован правильно, он с легкостью будет не только крушить противников, но и отправлять их в полет. Есть разновидность таких роботов, которая носит забавное название «Beater bots». Их оружие, хотя и действует по схожему принципу, похоже на большую взбивалку для яиц (egg beater): твердый плоский блок с вырезанной для облегчения веса серединой.

«Hobgoblin» — Beater bot
Крушитель (Crusher)

«Razer» — Двукратный чемпион мира и один из самых знаменитых роботов в спорте
Этакий стальной милаха, оборудованный внушительным острым клювом. Задача такого робота – схватить и уничтожить. Погнуть корпус, повредить начинку, в общем нанести как можно больше урона (и морального тоже, просто представьте, что останется от вашего бота после встречи с такой машиной). В плюсах возможность добавлять другие типы вооружения и существенная боевая мощь. В минусах – необходимость умения действительно круто им управлять (а вы попробуйте сначала схватить какого-нибудь особо шустрого противника), вес, который имеет по-настоящему мощная установка, и то, что в некоторых соревнованиях установлен определенный лимит того, сколько вы можете держать оппонента в захвате (поиграл – отпусти).
Флиппер (Flipper)
Суть флиппера (от английского «flipper»- «плавник», «ласт») заключается в том, чтобы опрокинуть своего противника. А уж если он, противник в смысле, еще и приземлится в какую-нибудь ловушку, то это вообще сказка. Такой робот оборудован рычагом, обычно связанным с мощной гидравлической или пневматической системой. Принцип действия, как и все гениальное, прост: подцепил, врубил, перевернул. Из минусов: если «рука» бота недостаточно крепкая, какой-нибудь спиннер с легкостью выдерет ее со всеми потрохами. И, при отсутствии другого оружия, ваша песенка спета. И, опять же, управление. Хочешь уметь с лету подцепить противника – тренируйся!
В процессе эволюции (естественной, ага) от флипперов отделился еще один класс: «Пусковая установка» (Launcher). Эти товарищи настолько мощные, что отправляют своих врагов в полет, буквально. То, что и многие просто флипперы способны на такое создает определенную путаницу, заставляя гадать, где же та тонкая грань между одним и другим.

«Bronco» Робот-Launcher, участник «BattleBots» из Саусалито, США
Подъемник (Lifter)
Этот вид роботов не ограничен какой-либо одной конкретной формой или размером, они могут быть совершенно разными. Главное, что их объединяет, это наличие приспособлений, способных цеплять и поднимать противника. Это могут быть шипы, крючки, пики, плоские пластины, похожие на пластины флипперов, или рычаги, которые приводятся в движение различными системами. Электрические, гидравлические, пневматические, пружинные механизмы и не только. Различие между флиппером и подъемником в том, что в случае с последним, во время атаки вражеский робот остается подвешенным на подъемнике до тех пор, пока не будет отпущен, успешно перевернут на нужный бок или спину, ну или просто не свалится.
Также многие из таких ботов используют свои орудия не только, чтобы поднимать противников, но и чтобы наносить им урон. Например прочный, заостренный край подъемной пластины легко используется в качестве тарана.

«Big Dill» – Робот-Lifter из Сиэтла
Молот (Hammer)
Фактически любой робот с установленным вертикально молотом, который может быть любой формы и размера. Что приводит в дилемме: быстрый и легкий или массивный и медленный? Тут уж каждый решает, что ему больше по душе. Сам по себе молот отличается от того же топора с таким же способом установки тем, что направлен на нанесение внутреннего урона, вместо того чтобы пробивать броню и отрубать колеса, например. Часто на молот добавляют различные шипы, чтобы повысить урон (А кто-то может и огнемет добавить, как у робота «Blacksmith» из США).

«Blacksmith» vs «Basilisk» 2016 год, «BattleBots»
Клещи (Pincers). Они же Когти или Челюсти (Claws и Jaws соответственно)
Принцип их оружия, как несложно догадаться, основан на сдавливании или захвате противника с двух сторон. Большинство таких роботов предназначено именно для захвата противника, но некоторые имеют своей целью пронзание вражеского бота и нанесение урона его внутренностям (должно быть очень неприятно). Сами «клещи» конструируют во множестве вариантов, так что они напоминают и загребущие руки, и челюсти, откуда, собственно и другие названия.
Из плюсов: можно комбинировать с кучей других орудий и очень эффективно, если удастся схватить противника. Из минусов: этого самого противника нужно еще умудриться схватить — чаще всего расстояние между активными элементами не очень большое. И опять же, если у вас только «хватательный» тип «клещей», что делать дальше?

Krab-bot, он же Crushtacean
Мульти-боты
Ну куда уж без читеров? А почему бы не сделать бота, который будет распадаться на несколько ботов поменьше, подумал кто-то шибко умный. И вот пожалуйста, вместо одного противника у вас может оказаться два, а то и четыре. Было много споров по поводу того, стоит ли допускать таких ботов к соревнованиям. На них накладывают разные ограничения, такие как, например, наличие оружия только у одного бота из команды, но и это не останавливает их конструкторов. Ведь можно собрать отличную многозадачную команду, главное с управлением справиться. Вес всех этих красавцев в сумме не должен превышать максимум в той весовой категории, в которой они выступают.

Swarm – мультибот, участвовавший в 5-м сезоне BattleBots. Слева направо: Москит, Саранча и Стрекоза
Экзотика
Различных видов боевых роботов неисчислимое множество. У них есть пилы, дрели, копья, мечи, даже булавы, механизмы для подъема после опрокидывания соперником, разные приспособления, чтобы запутывать оружие врага. Все, на что фантазии конструкторов хватит.
Есть робот в виде огромной мышеловки. Правда функционал, как мне кажется, у него сомнительный.

А есть и полноценный металлический рыцарь. В броне, с копьем, и на гусеницах. Ну, а что тут такого?

Sir Killalot из британских сезонов «Robot Wars»
А как насчет бабушки с топором, прямо как из фильма ужасов?

Первоначальный вариант «Granny’s revenge», еще без топора, но уже с декоративной бензопилой
И вот спрашивается, где все эти товарищи будут крушить друг друга, да так, чтобы их создателям, да и зрителям тоже, не досталось? А, вы уже построили арену, оборудовали ее высокими стенами из сверхпрочного пластика и стальными листами толщиной в 6 мм на полу? Неее… как-то скучно. Давайте добавим в эту зону пару-тройку ловушек. Мало? Ну давайте добавим еще.
Собственно, так и появляются все эти ямы, полные лезвий и пик, огнеметов и дробилок. Диски, встроенные в пол для того, чтобы раскручивать и разбрасывать в стороны любых роботов, оказывающихся на них и флипперы, подбрасывающие этих бедолаг в воздух. Плюс патрульные роботы, атакующие стоит только попасть в их зону поражения.
Вам все еще мало? Тогда добавим «Туман войны». Или сбросим на них стиральную машину, ее же все равно некуда девать.

Ой, да ладно, было то всего пару раз. И вообще, много препятствий не бывает, можно в принципе сделать арену, которая будет напичкана ими под завязку, и посмотреть кто сможет пройти по ней наибольшее расстояние. А потом просто будем наслаждаться грудами покореженного металла. Только еще ограничений на самих роботов накинем, а то вдруг они наши ловушки повредят.
Вот так, собственно, и получается, что по правилам большинства мировых турниров роботам запрещено использовать:
1. Жидкости (а то вдруг арену загадят).
2. Огнеметы и пиротехнику, а то вдруг взорвут. Хотя те же «BattleBots» допускают наличие мини-огнеметов, но только в целях повышения уровня зрелищности матчей, но никак не оружия.
3. Метательное оружие.
4. Электрошокеры.
5. Веревки, ткани, тросы – короче, все запутывающие оружие оппонентов прибамбасы. Эх, а раньше было можно).
6. Оборудование, создающее радиопомехи.
Помимо этого добавлено разделение по весовым категориям от супер-легкого веса до тяжелого — От 150 г и до 110 кг соответственно. Во всяком случае, именно эти границы использует большинство международных турниров. Главное при выборе весовой категории грамотно просчитать, какая часть веса уйдет на броню, какая на оружие, а какая на все остальное. Можно вбухать весь вес в защиту и получить неповоротливого робота, наносящего минимальный урон, а можно поставить тяжелое и эффективное оружие, но при этом сам бот рассыпется после одного-двух ударов. Так что главное в этом деле, как и в любом другом, соблюдать баланс и не терять энтузиазма.
Печально лишь то, что со временем ажиотаж вокруг этого вида спорта постепенно утихает. Уже несколько лет нет «Robot Wars», которые объявили о закрытии шоу через некоторое время после его перезапуска на ТВ. От «Битвы роботов» в России тоже ничего не слышно с 2019 года, собственно как и от «Бронебота». Только такой мастодонт как BattleBots еще держится.
Определенной популярностью также пользовались различные китайские соревнования: «King of Bots», «Fighting my Bots», «ClashBots». Последние для привлечения внимания аудитории пригласили в команды знаменитостей, которым нужно было управлять роботами. Фишка сработала и отдача была впечатляющей, и шоу посмотрело множество народу. О чем говорить, их даже KFC спонсировали.
Тем не менее, придумать что-то принципиально новое в рамках соревнований роботов сложно. Как только уже не изворачивались организаторы мероприятий. Было уже и сумо, где нужно вытолкнуть противника за пределы круга. И футбол, где нужно забить мяч в ворота противника. И «Снукер», когда наибольшее количество мячей нужно загнать уже в свои ворота. А также разные виды гонок, лабиринты, пинбол, перетягивание каната, «Царь горы», в котором нужно продержаться на арене как можно дольше. Но и все это зрителям уже наскучило.
Тем не менее осталось множество верных фанатов, которые продолжают смотреть и обсуждать, строить и участвовать. Людей, наслаждающихся зрелищем машин, сходящихся в смертельной схватке. Звуком, с которым метал находит на металл и искрами, которые при этом летят. Тем, как роботы сталкиваются и крушат друг друга. Они хотят видеть, как победит сильнейший и как слабый будет повержен в прах. И только это стоит того, чтобы продолжать
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!
42 года назад, 5 сентября 1980 года в Университете Бригама Янга был навсегда выключен последний суперкомпьютер IBM Stretch. Этот сверхмощный мейнфрейм, известный также под наименованием IBM 7030, стал результатом научно-исследовательского проекта, который корпорация IBM начала еще в 1955 году — его целью было построить суперкомпьютер, в сотни раз превосходящий по мощности все, что еще было создано до этого. Stretch по праву считался самым быстрым и продвинутым компьютером на всем земном шаре в конце 70-х и начале 80-х годов прошлого века, и в то же время снискал славу провального проекта, принес компании многомиллионные убытки и в итоге был выведен из эксплуатации. Почему его судьба сложилась именно таким образом? Все дело в завышенных ожиданиях.
История началась в 1955 году, когда Ливерморская радиационная лаборатория Калифорнийского университета объявила очередной тендер. Ученым был нужен суперкомпьютер под кодовым названием LARC (Livermore Atomic (Advanced) Research Computer, «Ливерморский компьютер для исследования атома»). Предполагалось, что эта машина будет помогать физикам-ядерщикам в сложнейших обсчетах атомных реакций. На самом деле, генеральным заказчиком, выделившим финансирование для этого проекта, была Лос-Аламосская научная лаборатория (управляемая Комиссией по атомной энергии), которая занималась разработкой ядерного оружия. В то время подходящую машину могли построить только два ведущих производителя — IBM и UNIVAC. Обе компании принялись составлять свои предложения, чтобы побороться за этот выгодный заказ.
Специалисты IBM, работавшие над тендерной заявкой, поняли, что смогут создать намного более мощную машину, чем требовалось заказчику. Если использовать недавно разработанные транзисторы с диффузным переходом, их суперкомпьютер многократно превзойдет заявленные технические характеристики по своей вычислительной мощности. Инженеры из IBM так вдохновились, что отозвали изначальную, менее амбициозную заявку, и подали новую, попросив еще один миллион долларов и дополнительный год на разработку.
В Калифорнийском университете заявку отклонили: не захотели ни ждать, ни переплачивать — так что компьютер LARC для них создала компания UNIVAC. А вот Лос-Аламосская национальная лаборатория получив заявку от IBM, заинтересовалась обещаниями невиданной производительности и дала ход проекту.
Заявленные инженерами IBM показатели и правда впечатляли — 4 MIPS, 4 миллиона операций в секунду. На тот момент широко использовались компьютеры IBM 704, выполнявшие 40 000 операций в секунду. То есть, по расчетам, новый суперкомпьютер должен был в сто раз превысить стандартную производительность того времени.
Разработка стартовала в начале 1956 года, и к 1960-му IBM планировала торжественно запустить суперкомпьютер. Но уже в процессе проектирования инженеры поняли, что никак не смогут оправдать ожиданий, однако надеялись хотя бы приблизиться к намеченным планам. Увы, результаты фактических тестов оказались неутешительными: производительность IBM 7030 Stretch оказалась примерно в три раза меньше заявленной — около 1,2 MIPS. Причиной стала необходимость снизить тактовую частоту компьютера: работа машины на изначально запланированной тактовой частоте приводила к перегреву и быстрому выходу транзисторов из строя. Тем не менее, Stretch все еще опережал конкурирующие вычислительные системы по быстродействию.
Президенту IBM Томасу Уотсону-младшему пришлось принять непростое решение и снять суперкомпьютер с продажи, а для тех, кто уже успел заказать Stretch, снизить цену почти вдвое — с первоначальных 13,5 до 7,78 миллиона долларов. Среди заказчиков суперкомпьютера были организации с такими громкими названиями, как «Агентство Национальной безопасности США», «Национальная метеорологическая служба США», «Корпорация MITRE», Полигон военно-морских сил США в штате Вирджиния, Организация по атомному оружию Великобритании и Комиссариат атомной энергетики Франции. Именно это обстоятельство вызвало волну недовольства в высших кругах Америки привело к тому, что проект Stretch долгое время считался самым крупным провалом в истории IBM. Впрочем, ответственным за это сделали главного инженера проекта Стивена Данвелла, а Томас Уотсон-младший отделался, как говорится, легким испугом.

Несмотря на неоправданные ожидания, Stretch во многом определил будущее не только суперкомпьютеров, но и их настольных потомков, которыми мы пользуемся сейчас. В чем же его уникальность?
Начнем с того, что он Stretch — это первый суперкомпьютер на транзисторах. Именно 169 тысяч высококачественных транзисторов с диффузным переходом помогли IBM 7030 совершить настоящую революцию в производительности. Эта машина первой в мире превысила порог в миллион операций в секунду, в 3 раза превзойдя своего предшественника, IBM 704. При этом новый Stretch потреблял столько же энергии и занимал точно такую же площадь — не более 186 кв. метров (2000 кв. футов).

Stretch стал на тот момент самым быстрым компьютером в мире и оставался таковым еще три года после своего появления, пока не уступил пальму первенства новому CDC 6600. Суперкомпьютер от IBM выполнял сложение 64-разрядных чисел с плавающей запятой за 1,5 микросекунды, а умножение – за 2,7 микросекунды. Невиданная производительность для той эпохи.
Что касается технологий, в суперкомпьютере IBM 7030 были собраны практически все известные на 1960 год достижения в области вычислительной техники. Stretch — пионер ECL, эмиттерно-связной логики. Впоследствии все суперкомпьютеры вплоть до 80-х будут собирать на схемах ЭСЛ. Его система модулей транзисторной логики SMS (Standard Modular System) впоследствии применялась почти во всех компьютерах IBM вплоть до середины 80-х. Архитектура, разработанная для IBM Stretch, легла в основу линейки System/360, которая в свою очередь на долгие годы стала промышленным стандартом благодаря целому ряду удачных инженерных решений. Принципы мультипрограммирования вкупе с защитой памяти и стандартными способами обработки прерываний — всё это компьютеры серии System/360 унаследовали от IBM 7030 Stretch. А впервые примененные в этом суперкомпьютере принципы конвейеризации инструкций, предвыборки кода и расслоения памяти используются даже в современных процессорах.

IBM Stretch был первым компьютером, который использовал стандартные модули ферритовой памяти. Интересно, что ферритовым сердечникам для нормальной работы была необходима как можно более стабильная температура, поэтому их помещали в алюминиевый корпус и погружали в масло. Оно помогало плавно охлаждать и при необходимости нагревать магнитные сердечники. Но это было скорее вынужденное решение, которое впоследствии не прижилось.
Память Stretch позволяла записывать и считывать шесть параллельных потоков, благодаря чему быстродействие ОЗУ составляло около 2 MIPS, так что память IBM 7030 была даже быстрее процессора. Из особенностей можно отметить также то, что в программах для этого компьютера использовался восьмибитный байт (в некоторых архитектурах байт состоял из 7 бит) и разрядность машинных слов 8/32/64 бита — это тоже стало стандартом. Интересно, что в то время советские компьютеры работали с нестандартной разрядностью машинных слов от 22 до 50 бит, зачастую еще и некратных размерам адресуемых ячеек памяти.

Различное периферийное оборудование вроде алфавитно-цифровых печатающих устройств, терминалов или перфораторов для перфокарт можно было подключать и использовать параллельно, просто вставив в соответствующий разъем Stretch кабель. В общем, эта «провальная» машина в целом отличалась весьма передовыми характеристиками и оказала большое влияние на развитие всей индустрии.
Кстати, и Ливерморская лаборатория, которая в начале этой истории отклонила тендерную заявку от IBM, в итоге все-таки прикупила себе IBM Stretch, ведь он оказался вдвое быстрее их суперкомпьютера UNIVAC LARC. Однако годы берут свое: к 1980 году IBM 7030 окончательно устарел, началась эра «персоналок», и на смену ему пришли более компактные и более современные машины. Один из построенных IBM экземпляров Stretch до последнего трудился в частном университете Бригама Янга в Прово, штат Юта, США, но 5 сентября 1980 года был списан на пенсию. Сейчас посмотреть на старичка можно в музее компьютерной истории в Маунтин-Вью, Калифорния.
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!

25 августа 1991 года, ровно 31 год назад, в USENET-конференции comp.os.minix появилось сообщение от молодого человека по имени Линус Бенедикт Торвальдс о том, что он создал бесплатную операционную систему для 386 и 486-совместимых ПК, с отдельным примечанием: в качестве хобби, новинка не претендует на лавры серьезного профессионального проекта вроде GNU. Так началась история Linux. Официальные источники гласят, что к творчеству Торвальдса сподвигли лицензионные и функциональные ограничения ОС MINIX, в которой он тогда работал. Кое-где даже упоминается, что он вдохновлялся книгой создателя MINIX профессора Эндрю Таненбаума «Операционные системы: разработка и реализация» (Operating Systems: Design and Implementation). Однако изучая историю Linux, я случайно наткнулся на воспоминания однокурсника Торвальдса — Ларса Вирзениуса, вовлеченного в разработку Linux с самых первых дней существования этого проекта. Ларс рассказывал эту историю из «первых рук», причем излагал ее немного не так, как она описана в «Википедии».
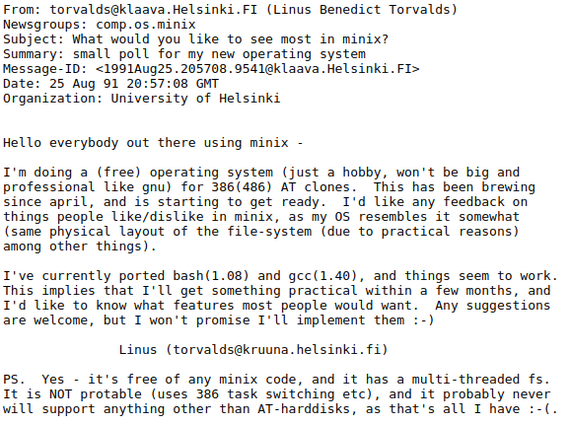
То самое историческое сообщение в группе comp.os.minix
В 1988 году Ларс Вирзениус окончил среднюю школу и поступил в Хельсинкский университет на факультет информатики. В сентябре его пригласили в клуб для шведоговорящих студентов «Спектрум», где состояли ребята, интересующиеся информатикой, физикой, химией и другими точными науками. Там он и познакомился с Линусом Торвальдсом. По воспоминаниям Вирзениуса, в университете было несколько компьютерных классов, в которых стояли «маки» и персоналки с MS-DOS, а также терминалы, подключенные к мейнфрейму VAX/VMS. Среди этого великолепия обнаружился один-единственный старенький компьютер от DEC с операционной системой Ultrix — одной из версий BSD Unix. MS-DOS не нравилась Ларсу своими ограниченными возможностями, графический интерфейс Mac OS показался ему неудобным, и он оккупировал машину с Ultrix. Однажды, работая в терминале, Вирзениус опечатался в команде «rm», набрав вместо нее «rn» — и совершенно случайно открыл для себя мир конференций USENET, где общались тысячи IT-специалистов и компьютерных энтузиастов с разных уголков нашей планеты. Своей необычной находкой Ларс поспешил поделиться с Линусом Торвальдсом.
Один из циклов в университете Хельсинки был посвящен программированию на С в Unix. К тому моменту Вирзениус неплохо знал С, Торвальдс тоже умел программировать на этом языке, при этом оба были постоянными участниками конференции comp.lang.c, сообщения которой они читали с университетского компьютера DEC. Поэтому содержание лекций казалось им не слишком интересным — значительная часть теории была им уже знакома. Ларс и Линус сдавали лабораторные работы экстерном, соревнуясь между собой, кто уложит очередную программу из учебного задания в меньшее количество строк кода. Гораздо большее удовольствие друзьям доставляли эксперименты с университетской машиной: Ларс разработал аналог демона Cron, чтобы выгружать почту в USENET-конференции по расписанию, а Линус написал код для поддержки Postscript-принтера в Ultrix.
На рождество 1990 года Торвальдс решил сделать себе подарок: он взял льготный студенческий кредит и 5 января купил 386-й компьютер. На этот компьютер Торвальдс действительно установил MINIX, но основной проблемой, которая злила и бесила его, было отсутствие в этой системе нормальной поддержки многозадачности. Больше всего Торвальдс хотел организовать модемный доступ со своей личной «трёшки» на университетский компьютер DEC, чтобы комфортно читать из дома любимые конференции USENET, но ни одна из существовавших тогда терминальных программ его не устраивала — в каждой чего-нибудь, да не хватало. Перепробовав кучу вариантов, Торвальдс начал писать собственный терминал. Причем он пошел нестандартным путем: вместо того чтобы использовать довольно ограниченные возможности MINIX, он решил, что его программа будет работать с «железом» напрямую, не опираясь на ресурсы ОС. Первая версия поддерживала два потока: один считывал нажатия клавиш и передавал их в последовательный порт, второй слушал последовательный порт и транслировал данные в терминал. После того, как Торвальдс добавил в свою программу поддержку набора команд VT-100, используемых в терминалах DEC, у него получилась софтина, вполне пригодная для обмена сообщениями в конференциях USENET из дома.
Однако настоящий перфекционист редко останавливается на достигнутом — Торвальдс принялся совершенствовать терминал, добавляя туда поддержку команд sh и функций многозадачности, начав с переключения между потоками. Линус написал подсистему вывода сообщений USENET на принтер и модуль управления памятью, и уже не мог остановиться. Терминал стремительно разрастался, превращаясь в ядро новой ОС: вскоре он обзавелся собственным драйвером жесткого диска и драйверами файловой системы, — из-за того, что Линусу нужно было как-то сохранять на диск скачанные из USENET через терминал файлы. Этими драйверами и модулями Торвальдс понемногу заменял стандартные компоненты операционной системы. Постепенно, день ото дня, MINIX на его компьютере мутировал в Linux. Правда, изначально проект назывался по-другому: Торвальдс придумал смешное словечко «Freax» — сборную солянку из слов «Free» «Freak» и «Unix», и попросил администратора сайта ftp.funet.fi Ари Леммке выложить на этот портал исходники его терминала. Но Леммке решил назвать папку на сервере по имени автора софта, добавив к нему окончание от «Unix» — получилось «Linux». Название прижилось, хотя строку «Freax» все еще можно найти в makefile ранних версий ядра Linux.
Ларс Вирзениус вспоминает, что первую версию Linux невозможно было установить в обычном понимании этого слова. На компьютере Торвальдса Linux зародился сам собой путем добавления и замены различных модулей MINIX, а первая попытка поставить систему на компьютер Вирзениуса не увенчалась успехом. Торвальдс возился несколько часов, при этом установка потребовала ручного редактирования секторов диска в шестнадцатеричном формате. В конце концов Линус справился с этой задачей, и в итоге сумел собрать на дискете дистрибутив, пригодный для инсталляции на других ПК почти без применения черной магии.
Зимой 1991 года Торвальдс добавил в Linux поддержку виртуальной памяти, что значительно повысило практическую пользу ОС. Тогда же вместе с Вирзениусом он создал собственную группу в USENET — alt.os.linux, которая стала местом притяжения первых пользователей и евангелистов новой системы. В 1992 году был запущен проект документирования Linux — он начался с файла README, который Ларс написал лично, чтобы помочь людям самостоятельно скомпилировать ядро. Регулярно возникающие технические сбои только подстегивали процесс разработки. Так, по словам Вирзениуса, проблемы в сетевом стеке Linux приводили к генерации паразитного трафика, из-за чего Linux запретили использовать в университетской сети. Это заставило Торвальдса вплотную заняться решением данного вопроса: как следствие, реализация стека протоколов TCP/IP была переписана практически полностью в очень сжатые сроки. У какой-нибудь корпорации вроде Microsoft на это ушли бы месяцы.
В 1997 году Линус Торвальдс покинул университет, был принят на работу в Transmeta и переехал в США, после чего Ларс Вирзениус потерял его из вида. Но его рассказ немного проясняет историю появления Linux, добавляя в нее несколько новых интересных деталей. Получается, Linux появился на свет не из-за амбиций разработчика, желавшего сделать «MINIX лучше самого MINIX», а как следствие скромного желания читать почту в любимых конференциях, не покидая пределы родного дома. Как говорится, великие вещи порой рождаются случайным образом, но для их появления на свет все равно нужны талант и упорство.
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!

Осенью 2001 года в моей жизни произошло значительное событие: корпорация Microsoft пригласила меня на официальную презентацию недавно выпущенной ею операционной системы Windows XP. Мероприятие проходило под лозунгом «Windows XP — это изменение стиля жизни», и в целом я был согласен с такой формулировкой. Прежде всего потому, что познакомился с этой ОС еще на этапе, когда она называлась Microsoft Codename Whistler — собственно, благодаря участию в программе бета-тестирования я и попал на этот праздник жизни. А первый релиз Windows XP увидел свет еще раньше, 24 августа 2001 года, то есть, ровно 21 год назад.
Во внутренней документации Microsoft эта версия ОС обозначалась как Windows NT 5.1, а с учетом того, что Windows NT 5.0 имела коммерческое обозначение Windows 2000, версия XP (от слова «eXPerience», «опыт») являлась ее глубокой модификацией. Перед разработчиками ставили задачу сделать ориентированную на «бизнес-пользователей» и коммерческий сектор Windows 2000 Professional более «юзер-френдли», добавив в нее удобство и простоту из ушедшей в прошлое линейки Win9X, но сохранив при этом свойственную NT надежность. Изначально в Microsoft планировали развивать две независимые ветки ОС на платформе NT — Neptune в качестве «домашней» редакции, с упором на игры и мультимедиа, и Odessey — для корпоративных пользователей. Но параллельная разработка двух семейств Windows требовала слишком больших ресурсов, и в январе 2000 года их объединили в общий проект, получивший кодовое название «Whistler» — в честь одноименного городка в Британской Колумбии, где сотрудники Microsoft любили проводить время, катаясь на лыжах.
Первая альфа-версия Windows Whistler, показанная в апреле 2000 года на конференции WinHEC, мало чем отличались от обычной Windows 2000 Professional как с точки зрения интерфейса, так и по внутреннему содержанию. В ней присутствовали некоторые элементы из Neptune, включая обновленный logon screen, была добавлена встроенная программа записи компакт-дисков, прототип механизма быстрого переключения пользовательских учеток Fast User Switching… и, пожалуй, все. Закрытое бета-тестирование стартовало в июне 2000 года, а первая публичная бета с обозначением Build 2296 (beta 1) появилась 31 октября. В ней еще кое-где встречались упоминания о Windows 2000, и система еще была довольно «сырой». Один из самых забавных багов этой сборки заключался в том, что значки, закрепленные пользователем в обновленном Главном меню, потом невозможно было открепить обратно без возни с бубном системным реестром.
В версии beta2 (Build 2405) уже наметились более серьезные изменения: началось тестирование механизма Microsoft Product Activation, и при установке системы требовался ключ продукта. В составе ОС появился Internet Explorer 6, Windows Media Player 8 и «Поисковый компаньон» (помощник по поиску), который будет сопровождать все последующие сборки Whistler вплоть до финального релиза. Помнится, эта новинка чуть не довела меня до инфаркта: в какой-то момент компьютер стал издавать жуткие скрежещущие звуки, очень похожие на звук умирающего винчестера. Оказалось, что скрежет исходит из колонок, а его источником является пёсель из поисковой панели, который, будучи оставленным без присмотра, начинает вычесывать блох с характерным звуковым сопровождением. В Beta 2 появилась тема оформления «Акварель» — предвестник будущей темы Luna, которая на данном этапе еще не была готова, и добавилась чуть позже, в публичной сборке 2428.
К версии Release Candidate 1 система уже в целом обрела привычный нам вид. На бутскрине и в окне About вместо «Microsoft Whistler» уже значилось официальное «Windows XP», а в сборке 2469 вместо примелькавшихся бета-тестерам обоев Red moon desert с алым пустынным барханом впервые дебютировала «Безмятежность».
В версии Release Candidate 2, выпущенной 27 июля 2001 года, Windows XP приняла свой окончательный вид, и Microsoft осталось устранить лишь мелкие шероховатости. Тогда же стартовала глобальная маркетинговая программа по раскрутке и продвижению новой операционной системы, на которую Microsoft совместно со своими партнерами из Intel, AMD, ASUS и Lenovo планировали потратить более 1 млрд долларов. К рекламе были привлечены лидеры мнений и звезды первой величины, включая Мадонну с ее песней Ray of Light, использовавшейся в телевизионной рекламе Windows XP на территории Северной Америки. Слоганом новой системы была выбрана фраза «приготовьтесь к полёту», но после трагических событий 11 сентября 2001 года ее спешно заменили на «Да, вы можете» (Yes, you can).
Перед официальным релизом Microsoft выпустила еще несколько тестовых сборок под общим наименованием Pre-RTM (2531 — 2542). Примечательно, что в сборках 2531 и 2332 в качестве обоев по умолчанию использовалась унылая сине-серая картинка с оригинальным названием «Windows XP», но уже в билде 2535 «Безмятежность» вернули на ее законное место.
В релиз для сборщиков компьютеров (Release to manufacturers, RTM), который состоялся 24 августа 2001 года, пошла сборка 2600, она же стала первой и основной официальной сборкой Windows XP. В этот день в Редмонде состоялось пафосное мероприятие, на которое были приглашены представители крупнейших производителей ПК. Им торжественно вручили кожаные портфели с дистрибутивным диском Windows XP, напоили шампанским и отправили восвояси на специально арендованных вертолетах. С этого момента и начался отчет эпохи Windows XP, которая завершилась 8 апреля 2014 года с окончанием расширенной поддержки этой системы.
Кто как, а лично я очень скучаю по «трехпанельному» Проводнику из ранних сборок Whistler, в котором древовидная структура дисков и папок на компьютере отображалась в отдельной подключаемой панели, что было очень удобно. Позже ее зачем-то заменили на стандартный «двухпанельный» вариант, который в несколько модифицированном виде дожил до Windows 11. Windows XP по праву считается самой успешной и надежной версией Windows из всей линейки NT, и до сих пор используется на миллионах компьютеров и ноутбуков по всему миру, несмотря на более чем зрелый возраст.
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!
Я давно лелеял мечту изучать лингвистику в Кембриджском университете. Каждое лето он проводит среди абитуриентов конкурс эссе на лингвистические темы; и профессор, отвечающий за связь факультета лингвистики с абитуриентами, посоветовал мне ради подготовки к поступлению поучаствовать вне конкурса. Летом 2016 тема эссе звучала так: «Часто утверждают, что наш язык влияет на наше мышление. Как это утверждение можно трактовать? Оцените его, приводя примеры из межъязыковых сравнений и/или психолингвистических экспериментов.» Осенью того года я получил от профессора крайне лестную оценку моего эссе; и тем не менее, в Университет меня не приняли. Этим летом я решил сдуть с того эссе виртуальную пыль, и перевести его на русский.

Вопрос «Влияет ли язык на мышление?» давно волнует умы, и немало статей озаглавлено этим вопросом. Связь между языком и мышлением была отмечена уже два века назад, и успела укорениться в массовом сознании: например, распространён миф о том, что у эскимосов необычно богатый набор слов для обозначения видов снега. Аргумент про «эскимосские названия снега» применяют двояко: указывая либо на то, что люди вырабатывают более богатый набор обозначений для того, с чем чаще имеют дело; либо на то, что более богатый словарный запас позволяет выражать более тонкие смысловые различия, незаметные носителю другого языка: «Мы, европейцы, так же неспособны различать виды снега, как дальтоники неспособны различать цвета.»
«Языковой дальтонизм», т.е. отсутствие в некоторых языках названий для некоторых цветов, интригует исследователей уже дольше века. Начиная с середины 20 в. проводились эксперименты, доказавшие, что людям легче различить два цвета, если в их языке эти цвета называются по-разному. Например, народу химба, живущему в Намибии, сложнее, чем нам, отличить синий от зелёного, зато проще отличить dumbu — так на языке химба называются жёлтый и бледно-зелёный цвета — от burou, соответствующего тёмно-зелёным, синим и фиолетовым оттенкам. И дело не только в разнице между нашим и южноафриканским образом жизни и культурным опытом: подтвердилось, что русскоговорящие бостонцы легче, чем их соседи-монолингвы, отличают синий цвет от голубого.
Причинно-следственные связи между словарным запасом и мышлением не ограничены областью цветовосприятия. В нескольких австралийских языках нет слов, означающих право и лево — вместо этого австралийцы называют стороны света: «Объясняя, где находится предмет в вашем доме, они скажут: «На южном краю западного стола». Такие описания используются для предметов любого масштаба, вплоть до «У вас на юго-восточной ноге сидит муравей.» Владеть такими языками невозможно без отличной ориентации в пространстве; и действительно, их австралийские носители могут не задумываясь указать стороны света «независимо от условий видимости, в густом лесу или в степи, в помещении или даже в пещере, стоя или на ходу...»
В языке может не быть не только названий относительных направлений, но и цветов вообще, и других лексических категорий, без которых нам, европейцам, сложно представить речь — например, числительных. Так, в Амазонии у народа пирахан из числительных есть только мало, несколько и много, а из цветов — только тёмный/холодный и яркий/тёплый. Аналогичный ахроматизм относится и к некоторым папуасским языкам; а по поводу других языков исследователи продолжают спорить, есть ли там обозначения для цвета отдельно от материала, текстуры и других характеристик описываемого объекта. Наша интуиция подсказывает, что называть цвета «естественно»; но разве естественно описывать вид изумрудов, травы, змей и яблок одним и тем же словом зелёный? Ведь выглядят они совершенно по-разному!
Хорошо иллюстрирует разницу в восприятии юкатекский язык, на котором говорят майя Юкатана: в этом языке названия цветов зависят не только от оттенка и яркости, но также от прозрачности, текстуры и размера предмета. Материалы занимают в юкатекском центральное место: все существительные в нём неисчисляемые, как наши молоко, песок, золото и другие названия материалов. Вместо слова свеча эти майя скажут палка воска или шарик воска, в зависимости от формы. Когда их просят указать «самый похожий» предмет, то они обычно выбирают совпадающий по материалу, а не по форме: например, самым похожим на металлический гвоздь они считают обрезок металла, тогда как американцы чаще выбирают деревянный карандаш. Похожие эксперименты проводились с носителями японского и китайского языков, в которых для счёта предметов используются особые счётные слова, примерно как мы говорим «стакан молока», «лист бумаги», и т. д. Оказалось, что японцы и китайцы выбирают совпадение по материалу чаще, чем англоговорящие, хоть и реже, чем майя.
Чем абстрактнее понятие, тем чаще случается, что один язык чётко выражает разницу, неясную или полностью отсутствующую в другом. Например, русское слово лестница обозначает разные виды конструкций, которые по-английски называются ladders и stairs. Мы можем уточнить конкретный вид лестницы — стремянка, эскалатор и т. д., — но по-русски невозможно описать категорию, включающую все виды ladders и при этом исключающую все виды stairs, или наоборот. Противоположный пример — слово jealousy, которым по-английски называется и ревность, и зависть: англоговорящие монолингвы не всегда различают эти два чувства, и я видел длинную газетную статью, посвящённую разнице между ними. У нас зато есть два однозначных слова, и нет никакой надобности объяснять между ними разницу.
Итак, можно считать доказанным, что разница в словарном запасе влияет на восприимчивость носителей языка к соответствующим явлениям реального мира. А на что влияет разница в грамматике? Чтобы перевести предложение «the cat drank the milk» на русский, необходимо указать пол животного и было ли действие завершено; зато на русском, в отличие от английского, необязательно указывать на определённость животного и молока. Чтобы перевести это же предложение на турецкий или на корейский, необходимо указать, видел ли пьющее животное сам говорящий, или же узнал об этом событии из другого источника. В некоторых южноамериканских языках форма глагола выражает эвиденциальность ещё полнее: одна форма используется очевидцем события, другая узнавшим о событии по косвенным свидетельствам, третья пересказывающим чужие слова, четвёртая выражающим собственные умозаключения; а временные формы глагола выражают как время события, так и время, когда о событии стало известно. Значит ли это, что мы больше англичан обращаем внимание на пол животных, а турки, корейцы и южноамериканцы сильнее озабочены достоверностью высказываний?
Грамматический род действительно влияет на то, как европейцы мыслят — например, какими качествами наделяют неодушевлённые предметы, или каких животных считают похожими. Меньше внимания уделялось влиянию рода в более экзотических языках, таких как вымирающий австралийский язык дирбал, прославившийся отдельной грамматической категорией для «женщин, огня и других опасностей» — и тремя другими категориями для мужчин, животных, и съедобных вещей. Нам такая классификация может казаться курьёзной; но точно так же и система из трёх родов, типичная для европейских языков, может казаться курьёзной неевропейцам. Так, в иврите два рода, мужской и женский, и большинство названий животных склоняются по роду, например atul «кот» и atula «кошка». В беседе с израильтянином-монолингвом я упомянул, что в русском есть средний род в придачу к двум привычным ему; он воскликнул в недоумении: «Как это? кот, кошка и шаверма?» — ожидая, что и русские названия животных можно поставить в форму любого рода. Чем не свидетельство того, что носители языков без среднего рода воспринимают мир иначе, чем европейцы?
Из всех элементов грамматики влияние рода сильнее всего исследовано экспериментаторами-психолингвистами. А как может влиять на мышление обязательное указание определённости или эвиденциальности? «Лингвистические детерминисты» давно предполагали такое влияние, но откладывали его исследование «до тех пор, когда появятся менее грубые инструменты». Один интересный результат касается корейских детей: они осознают разницу между непосредственным и опосредованным знанием в том же возрасте, как и американцы, и лишь позднее осваивают грамматическое выражение этой разницы. Это опровергает предположение о том, что обязательное указание эвиденциальности помогает корейским детям осознать соответствующую семантическую разницу. Меньше всего исследовано влияние синтаксиса и морфологии: по-разному ли мыслят носители языков с порядком слов SVO и SOV, или аналитических, флективных и агглютинативных? Тяжело придумать эксперимент, который помог бы выявить такую разницу. Самое близкое из достигнутого — доказательство влияния в противоположном направлении, со стороны образа жизни и сценариев общения — на морфологию: чем сложнее устроено общество, тем проще устроены слова.
Эксперименты, перечисленные выше, позволяют ответить, «влияет ли язык на то, как мы мыслим» и действительно ли «мышление не только зависит от языка вообще, но в некоторой степени от каждого конкретного языка» — так основной тезис лингвистической относительности был впервые сформулирован в 1820. Ответ будет зависеть от того, как заданный вопрос понимать: «влияет ли язык на то, как мы мыслим, когда говорим на этом языке», или же «влияет ли язык, которым мы владеем, на то, как мы мыслим вообще»? Вторую формулировку можно подразделить на «влияет ли язык, которым мы владеем, на то, как мы мыслим, даже когда не говорим» и «влияет ли язык, которым мы владеем, на то, как мы мыслим, даже когда говорим на другом языке» — ведь языком мы, не всегда осознавая это, пользуемся не только для общения: запоминать цвета, числа или направления, и выполнять над ними мысленные действия — намного сложнее для того, кто неспособен назвать их словами. Например, пирахан, в чьём языке нет числительных, могут выполнять арифметические действия над осязаемыми предметами, но затрудняются воспроизвести число предметов по памяти. Другой пример — то, что австралийцы, для которых кууку-йимитирский язык родной, когда рассказывают о событии или воспроизводят его по памяти, без затруднения восстанавливают его ориентацию относительно сторон света; нам, европейцам, для этого понадобилось бы сознательное усилие.
На первый подвопрос можно с уверенностью дать положительный ответ: говорящим на разных языках действительно приходится обращать внимание на разные аспекты того, о чём они говорят — одним на оттенок и материал предмета, другим на географическую ориентацию, третьим на достоверность события, четвёртым на пол животного. Данные по поводу двух других подвопросов более противоречивы. С одной стороны, в экспериментах по различению синего и голубого — на первый взгляд не пользуясь никаким языком — русскоговорящие теряли преимущество, когда им приходилось одновременно с различением цветов выполнять словесное задание, мешавшее мысленно называть цвета по-русски. Аналогично и англоговорящие, когда им «словесные помехи» не позволяли мысленно называть число предметов, воспроизводили это число по памяти не лучше пирахан. С другой стороны, когда итальянцы оценивали схожесть животных по изображению, и подопытным ничто не мешало мысленно называть показанных животных — то результаты меньше коррелировали с грамматическим родом названия животного, чем когда участникам показывали карточки со словами. Итак, в разных мыслительных процессах язык задействован по-разному: доказано даже, что он сильнее влияет на зрение правым глазом, чем левым!
В любом случае важно подчеркнуть, что ограничения языка, как то отсутствие названий для цветов, направлений и т.п. — не стесняют остроту восприятия или мыслительные способности носителя такого языка: наоборот, особенности языка могут развивать те или иные способности. Ни один новорождённый не понимает, что значит зелёный или левый; и если ребёнок, растущий в нашем обществе, способен освоить эти понятия — значит, при достаточной мотивации их способен освоить любой человек, где бы он ни вырос. Мы не более восприимчивы к зависти и ревности, чем англоговорящие: всего лишь им нужна газетная статья, чтобы осознать разницу между двумя чувствами, называемыми одним словом, а мы эту разницу усвоили вместе с родным языком. Билингвы постепенно усваивают цветовые различия, типичные для своего второго языка — тем сильнее, чем дольше они живут в обществе, где этот язык доминирует — одновременно с этим утрачивая цветовые различия, типичные для своего родного языка. Носители кууку-йимитирского языка успешно осваивают английские слова left и right, и более того — привыкнув, что «белые люди не разбираются в сторонах света», они могут в разговоре на английском описать место как «справа от аэропорта», хотя в этом контексте англоговорящие использовали бы географические направления, а не относительные.
Эти примеры подтверждают, что язык влияет на мышление, а не только отражает его: освоение нового языка заставляет думать по-новому. В середине 20 в. выдвигалась гипотеза о «лингвистическом детерминизме» — что человек неспособен понять то, что неспособен выразить его язык; что люди «оказываются в плену конкретного языка, ставшего средством выражения в их обществе». Современные исследователи отвергают эту гипотезу, и даже клеймят её «расистской». Вместо этого они пришли к пониманию: «разные языки по-разному влияют на наше сознание; но разница не в том, о чём наш язык позволяет думать, а в том, о чём он обязывает думать». Соответственно, наша «неспособность различать виды снега» — такой же миф, как и сами «бесчисленные названия снега у эскимосов».
Оригинал
Подписывайтесь на наш блог, чтобы не пропустить новые интересные посты!





