
Базовые ФБ в Soft Motiom CoDeSyS 3.5
Приветствую уважаемые читатели сегодняшняя статья будет посвящена базовым функциональным блокам в системе Soft Motion.
По всем вопросам пишите в телеграмм канале "Ты же инженер АСУ ТП"
Статья будет коротенькой, излагаю базовое понимание.
Запуск драйвера
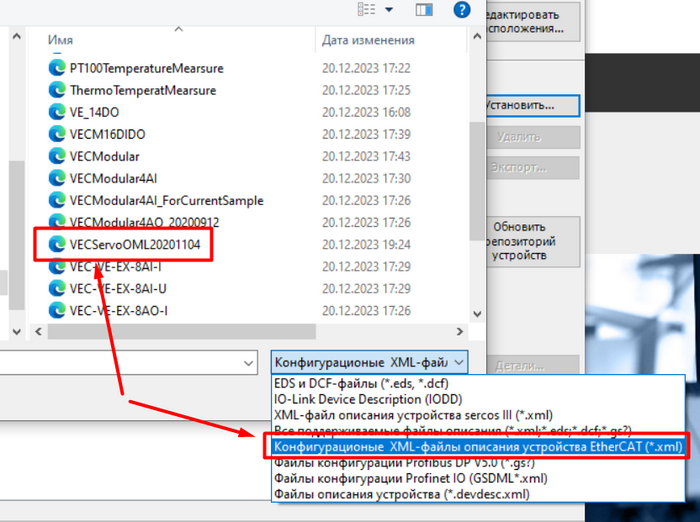
Сначала нам нужно сделать все необходимые настройки для цепочки Сервоусилитель - двигатель. Настроить все конфигурации и параметры мотора (Ток, момент, эл. параметры). Обычно это сё делается через программу конфигуратор. Она поставляется штатно с сервокомплектом.
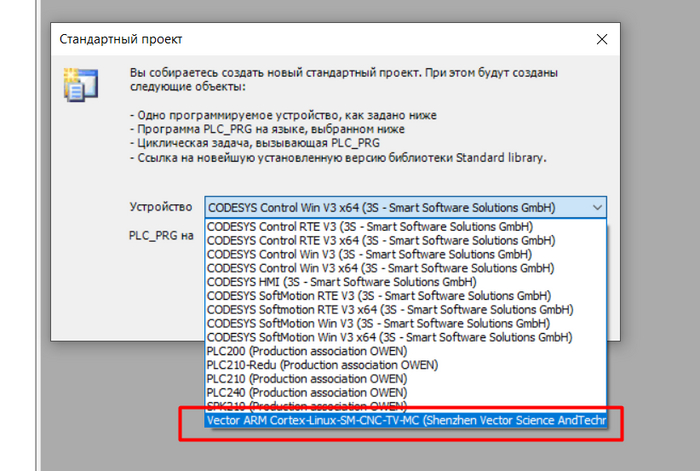
В прошлых статьях я описывал первоначальное программирование в среде CoDeSyS 3.5. Двигаемся дальше.
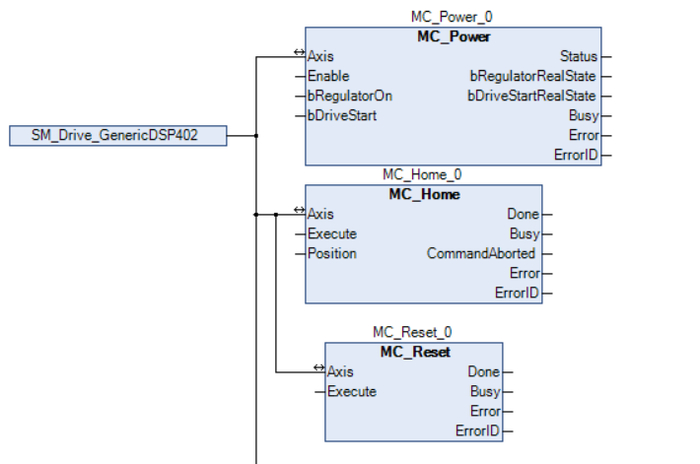
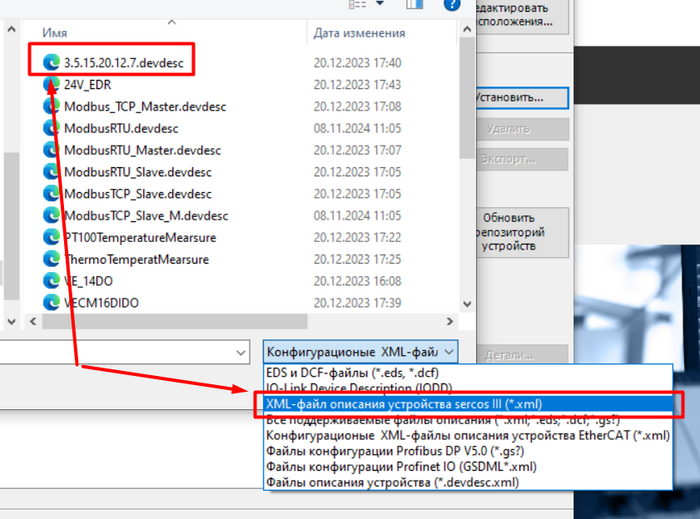
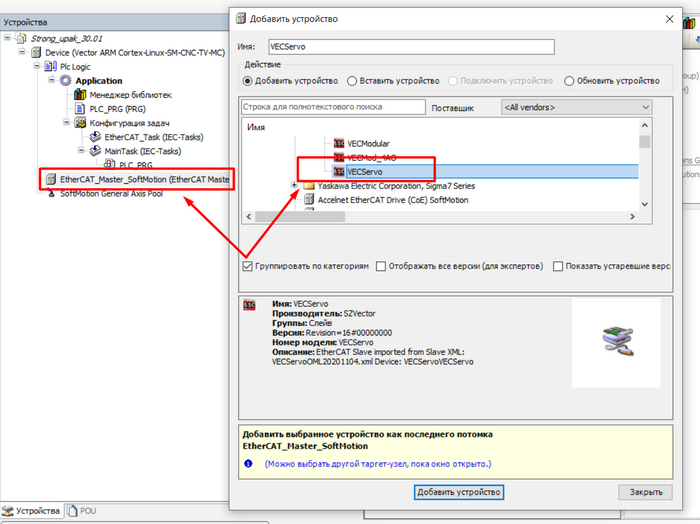
Первоначально с файла конфигурации нам нужно направить в ФБ Оси энкодеров, в даном случае SM_Drive_Generic.
MC_Power - запускает сам сервопривод. Нужно присвоить True входам Enable, RegulatorOn, DriveStart. Если всё ок, получаем Status = true.
MC_Home - это присвоение двигателю нулевой позиции. Присваивать нужно, когда двигатель не запущен.
MC_Reset - сброс всех аварий.
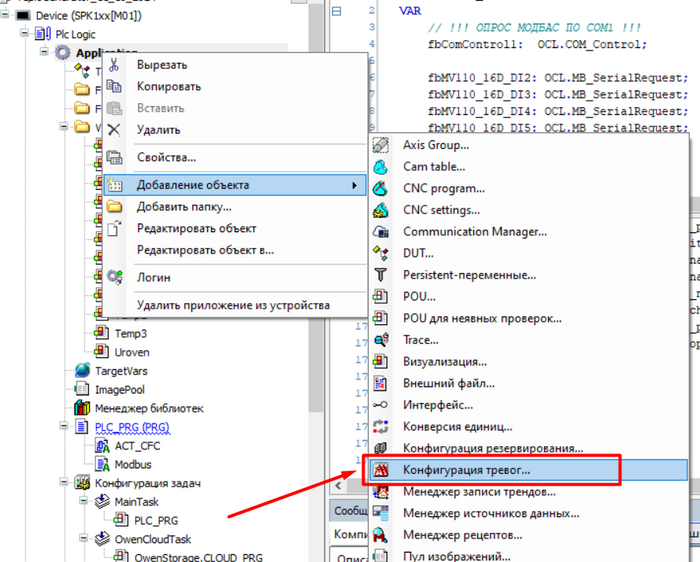
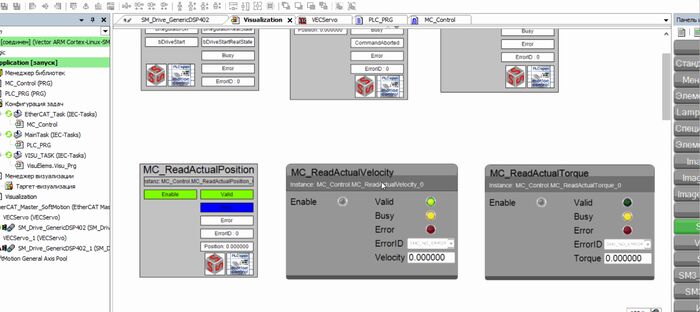
Мониторинг параметров
Это функциональные блоки для анализа основных параметров двигателя, таких как момент, позиция и скорость.
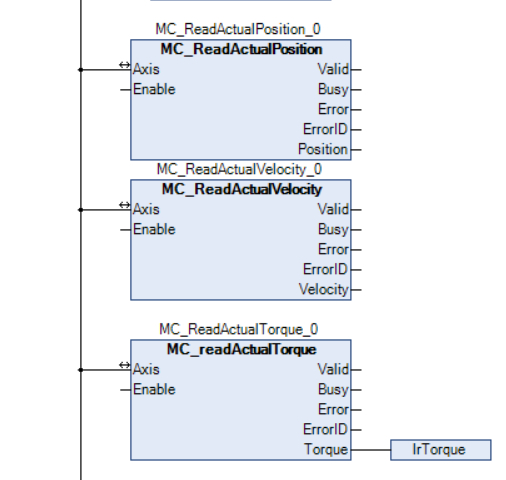
MC_ReadActualPosition - этот параметр выдает текущую позицию двигателя, неважно в каком он работает режиме.
MC_ReadActualVelocity - параметр выходной скорости.
MC_ReadActualTorque - параметр выходного момента.
Запуск двигателя в нужную позицию
Эти ФБ отвечают за позиционирование двигателя в нужной точке.
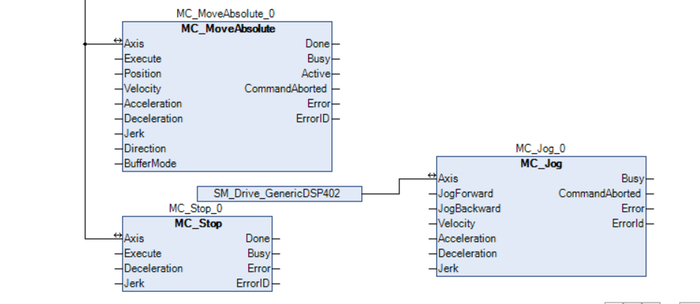
MC_MoveAbsolute - функциональный блок позиции.
На входе задаем пользовательские единицы Position, задаем скорость, ускорение и торможение Velocity, Acceleration, Deceleration. Если нужно вращать по часовой стрелке то позиция с положительным знаком, против с отрицательным знаком. И жмём кнопку Execute.
MC_Stop - останов двигателя с временем торможения.
MC_Jog - толчковый режим. При нажатии кнопки, двигатель вращается, при отпускании - останавливается. Можно фиксировать позицию.
Вот так это выглядит в режиме Онлайн.
На этом я заканчиваю, всем спасибо, пока пока!!