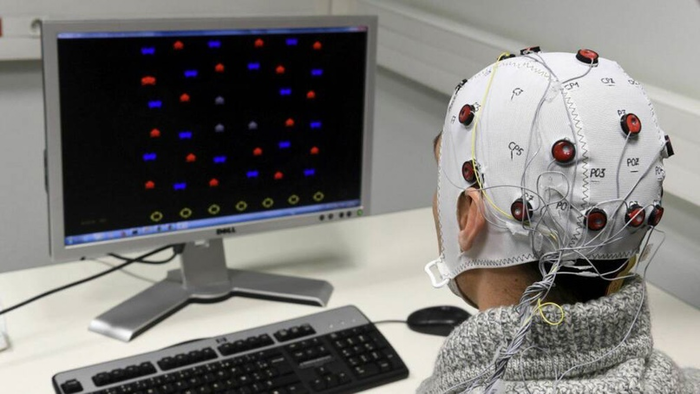
Киборги здесь / Фото: Shutterstock
Профессор Кевин Уорвик, также известный как капитан Киборг, был связан со своей женой.
Не то чтобы каждый из нас был связан со своим партнером, но действительно связан: его нервная система была подключена к микросхеме, передающей его психическое состояние, а его жена носила ожерелье, которое соответственно меняло цвет.
Она также могла определить его местонахождение в любой момент. Эта микросхема предоставляла Уорвику различный сервис: например, когда он приходил на работу, двери его офиса открывались автоматически;
А когда он возвращался с работы, свет, кондиционер и компьютер включались при его приближении к дому.
И все же очень удивительно, что чип, который, по утверждениям заговорщиков, власти пытаются внедрить в нас, Уорвик имплантировал в свое тело по собственному желанию.
Уорвик - профессор инженерии в Британском университете Ковентри и специалист по коммуникации между компьютером и мозгом. Каждый эксперимент, который он проводил над своим телом, имел научную цель.
Он также провел эксперимент, в котором общался со своей женой телепатически: он передавал сообщения из своего мозга, которые передавались непосредственно на чип и переводились в азбуку Морзе внутри чипа, имплантированного в руку его жены.
Хотя Уорвик проводил эти эксперименты ради науки, есть люди, которые подключают свою нервную систему к электрическим компонентам не в рамках эксперимента.
Это социокультурная группа под названием “Гриндеры”
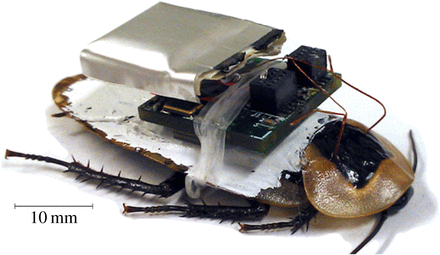
Волонтеры, в том числе студенты Уорвика, которых привлекли в его лабораторию, имплантируют магниты в кончики пальцев, которые позволяют им ощущать или управлять своим окружением, не касаясь его.
Волонтер по имени Рик Ли из Юты имплантировал себе наушники, через которые он слышит музыку. Позже, по его словам, они могут позволить ему ориентироваться в мире, даже если не дай бог он ослепнет как летучая мышь
У него есть магниты на кончиках пальцев, тепловые датчики в руке и чип для управления приборами другим пальцем. В прошлом он имплантировал себе внутренние наколенники, которые должны были защитить его колени от удара бейсбольной битой.
Но имплантаты доставляли ему дискомфорт, и он сам их удалил. Боль была невыносимой.
-Самый известный продукт, который профессор Кевин Уорвик разработал для меня, это "Lovetron-9000", компонент, который должен быть имплантирован внутрь мужских гениталий, чтобы вызвать вибрацию и улучшить сексуальные ощущения, сказал Рик Ли.
Между тем бывшая жена Ли попросила отказать ему в опеке над совместными детьми из-за его деятельности в качестве киборга.
Однако суд постановил, что нет никакой разницы между ним и людьми, которые часто делают пластические операции.
«Я был набожным мальчиком-христианином, интересовавшимся космосом и технологиями, но я думал, что это немного излишняя область интереса, учитывая, что апокалипсис стремительно приближается», - сказал он журналисту "Gizmodo" перед судом.
Gizmodo - это сайт о дизайне, технологиях, науке и фантастике. Первоначально он был запущен как часть сети Gawker Media под управлением Ника Дентона и работает на платформе Kinja. Gizmodo также включает дочерний сайт io9, который фокусируется на научной фантастике и футуризме. Википедия (Английский язык)
«Когда я понял, что этого не произойдет, вероотступничество, было моим единственным выходом из христианства, и я в конце концов нашел атеизм».
Понимая, что наука не продвигается достаточно быстро, «я начал планировать для себя, как я могу стать бессмертным киборгом-мутантом, которым всегда мечтал быть».
Многие "гриндеры" надеются и пытаются спастись от неминуемой смерти, но иногда результат оказывается прямо противоположным.
Партнером Ли в разработке имплантированного вибратора должен был стать Аарон Трейвик, основатель Ascendance Biomedical, который пытался разработать генетические методы лечения и экспериментальные лекарства без участия академических институтов или какого-либо надзора.
Аарон Трейвик прожил жизнь как зрелище со всеми включенными камерами, поэтому для тех, кто его знал, неудивительно, что его смерть также была окутана зрелищем и спорами.
В свои 28 лет Трейвик был одной из самых печально известных фигур в мире биохакинга - грандиозным генеральным директором крошечной компании под названием Ascendance Biomedical, целью которой было разработать и испытать новые генные методы лечения без затрат и тщательности клинических испытаний или надзора со стороны специалистов FDA.
Трейвик хотел вылечить рак, герпес, ВИЧ и даже старение, и он хотел сделать это, не соблюдая правила и меры безопасности регулирующих органов и отраслевые стандарты.
«В мире есть прорывы, которые мы можем вывести на рынок таким образом, чтобы мы не упирались в стены FDA, а вместо этого обходили их», - сказал Трейвик, во время конференции по биотехнологиям в Сан-Франциско в январе 2017-ого года.
Чтобы «обойти» регуляторов, Ascendance и другие биохакеры обычно полагаются на тестирование продуктов на себе. Самостоятельное экспериментирование, хотя оно и не приветствуется такими агентствами, как FDA, затрудняет вмешательство регулирующих органов. Правила, регулирующие разработку лекарств, просто не написаны для наблюдения за тем, что человек может сделать с собой.
На другой конференции в феврале 2018 года Трейвик снял штаны на сцене и ввел в свое голое левое бедро экспериментальное средство от герпеса, разработанное его компанией.
Этим поступком он привлек внимание к тайному миру биохакеров, создав для всего мира образ этих самодеятельных биологов как группы сумасшедших импресарио.
Вскоре после этого его компания рухнула в результате драмы в стиле Джерри Спрингера, некоторые из которых были сняты на камеру Vice.
Большинство его подрядчиков-биохакеров либо уволились, либо были уволены (в зависимости от того, кого вы спрашиваете), оставив Трейвика методы лечения, которые он обещал разработать, но уже некому было выполнять эту работу.
Тем не менее, Трейвик, похоже, не испугался, запустил предпродажную кампанию, в которой присоединился к списку ожидания нерегулируемых терапий Ascendance, даже несмотря на то, что казалось маловероятным, что они когда-либо выйдут на рынок.
Затем эта мечта о недорогой генной терапии с открытым доступом рухнула, когда в конце сеанса в резервуаре сенсорной депривации в спа-салоне DC Трейвик был найден мертвым.
В то время как жизнь Трейвика проверяла пределы возможностей DIY-науки, его смерть символизирует перекресток для движения. Будет ли он и дальше раздвигать границы экспериментов на себе или предпримет шаги для обеспечения безопасности?
«До Аарона никого не волновало, что делают биохакеры», - сказал Джозия Зайнер, своего рода соперник Трейвика и биохакер, который впервые применил трюк с инъекциями на сцене, в августе 2017-ого года, когда он ввел себе ген, способствующий росту мышц.
Бинарным гендерным представителем этой области является Лефт Аноним, который имплантировал в свое тело более 50 бионических компонентов. Поскольку у него нет медицинского образования, Лепт не может покупать без лицензии обезболивающие средства и поэтому вынужден выполнять все операции в полном сознании.
Среди чипов, имплантированных в его тело, - магниты дистанционного зондирования, кредитная карта и карта памяти, подключенная к Интернету. Но эксперимент с картой памяти провалился, и ему пришлось удалить ее, так что были повреждены некоторые нервы на руке.
«Здоровье вторично по сравнению с любопытством», - сказал Лефт.
Экспериментаторы вносят изменения в свое тело ради науки и любопытства, но есть и те, кто пытается таким образом решать медицинские проблемы.
Именно так поступил Илон Маск, когда основал компанию Neuralink, которая разрабатывает имплант, который должен позволить парализованным телепатически общаться с миром.
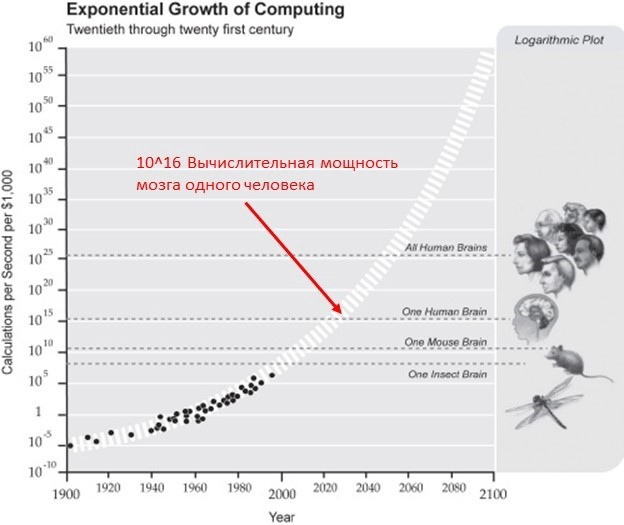
Настоящая цель Neurlink, сказал Маск в прошлом, давая интервью для подкаста Joe Rogan Experience, - привести нас к состоянию, когда мы можем мобилизовать все вычислительные возможности искусственного интеллекта на благо нашего мозга.
По его словам, если мы этого не сделаем, искусственный интеллект уничтожит нас или поработит нас.
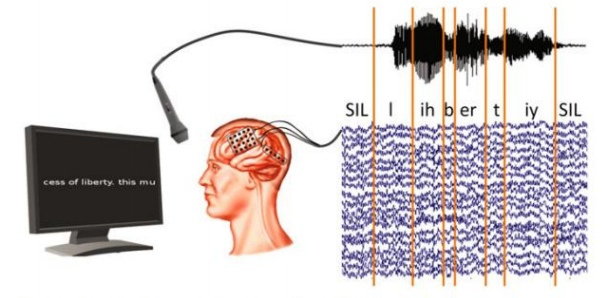
Другая компания под названием Synchronization, разработавшая устройство, задачей которого является перевод мыслей, парализованных в движения, также разработала программу клинических испытаний FDA, для которого она написала протокол для экспериментов в интерфейсе мозг-компьютер.
Теперь, когда стало ясно, что FDA открыто для этого, капитал Кремниевой долины также начал перетекать в сферу этой деятельности. Согласно отчету индийского технологического сайта TracXN, десять компаний, работающих в этой области, уже привлекли десятки миллионов долларов каждая;
Neurlink собрал более 200 миллионов долларов.
Перевод seminon600
ИсточникИсточник