По-простому о нейроинтерфейсах. 2 часть
Продолжение
Первая часть тут.
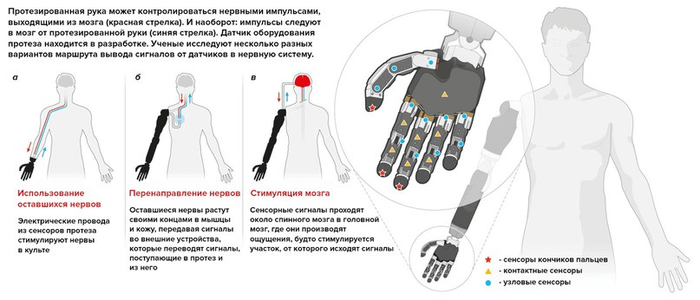
Основная масса протезов с управлением от нервных сигналов не имеют обратной связи, но есть модели и с реализацией частичной обратной связи.
После ампутации конечности в организме остаются двигательные нервы, которые ее контролировали. Остатки нервов можно хирургическим путем перенести на маленький участок какой-нибудь крупной мышцы (это и называется реиннервацией). Например, к большой грудной мышце, если речь идет об ампутированной руке. В результате человек думает, что надо бы пошевелить пальцем. Мозг отправляет сигнал участку грудной мышцы, к которой присоединили нерв, шедший раньше к пальцам. Сигнал фиксируют электроды, которые отправляют импульс по проводам в процессор внутри роботической руки. Тут помогает электромиография. Эта технология позволяет регистрировать разность электрических потенциалов, возникающих при работе мышцы. Она улавливает движение реиннервированного участка грудной мышцы, после чего сигнал передается к нужной части протеза, и эта часть двигается.
Аналогичным образом осуществляется целевая сенсорная реиннервация. Она нужна для того, чтобы при помощи протеза человек мог чувствовать прикосновение, тепло или давление. Тут все в обратном порядке. Хирург перешивает уже оставшийся чувствительный нерв к участку кожи на груди. А сенсоры на протезе передают сигнал от прикосновения к этому самому кожному участку. И человек испытывает тактильные ощущения.
Первым пациентом, получившим эту «целевую реиннервацию», был Джесси Салливан, инженер-энергетик, который потерял обе руки из-за электрических ожогов. После того, как нервы рук были перенаправлены на его грудные мышцы, Салливан смог управлять протезными руками, просто думая о действиях. Но, к всеобщему удивлению, он также почувствовал, когда его груди коснулись. Будто бы коснулись его рук. Оказалось, что перенаправленные нервы вросли в кожу груди, и его мозг интерпретировал сенсорные сигналы в исходящие из его руки. Отдельные участки груди отвечали за касание ладони, другие же за касания пальцев и предплечья.

Но применение нейропротезов в медицине не ограничивается только управление моторикой и частичным восстановлением слуха. Немаловажной областью является восстановление зрительных систем.
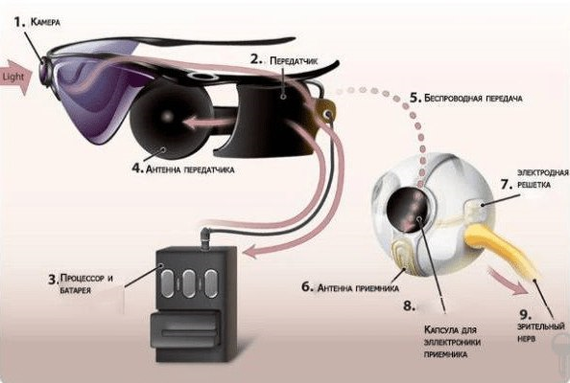
Миниатюрная камера, установленная на очках, используется для захвата изображения. Затем эти изображения анализирует портативный процессор и преобразует в электронный сигнал. Импульсы сигнала транслируются на имплантат по беспроводной сети через радиочастотные катушки. Полученный сигнал передается в электродную решетку, управляющую нервными элементами сетчатки (то есть биполярными и ганглиозными клетками). Именно здесь начинается обработка сигнала, и далее интегрируется, когда он проходит через зрительный нерв на зрительную кору для окончательного восприятия визуального изображения. Общая методика заключается в электрическом стимулировании зрительных путей с помощью протеза зрения или «бионического глаза». Суть стимуляции — в вызывании активности нейронов на участке, который остается функциональным независимо от основной причины слепоты.
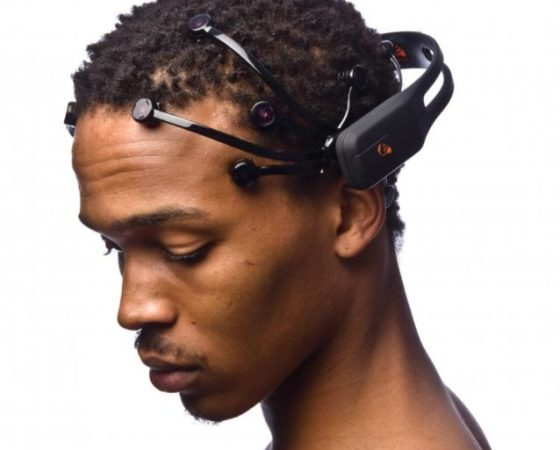
Развлекательная и игровая индустрии. С 2012 года произошел бум НКИ в игровой индустрии: от «перетягивания каната», а точнее, шарика в устройстве MindBall до управления шариком в тубе в Star Wars Force Trainer. К сожалению, многие девайсы в этой категории используют название нейроинтерфейса, не имея с ним ничего общего. В некоторых считывается напряжение лицевых нервов, другие измеряют напряжение на самой голове, не доходя до нейронов. В целом, большая часть устройств в этих сферах применяют интригующую приставку «нейро», но в действительности не используют сигналы мозга.
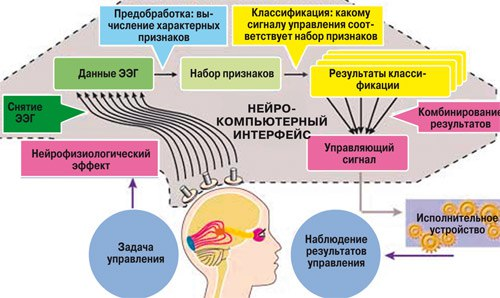
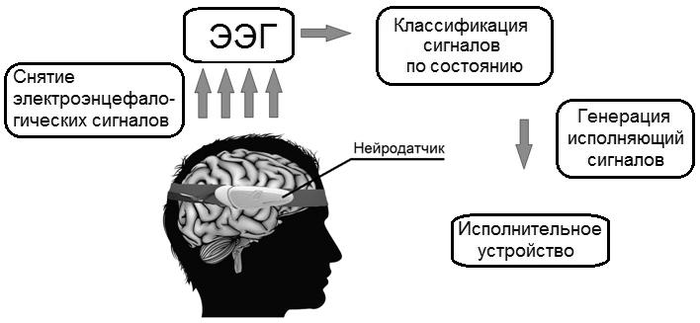
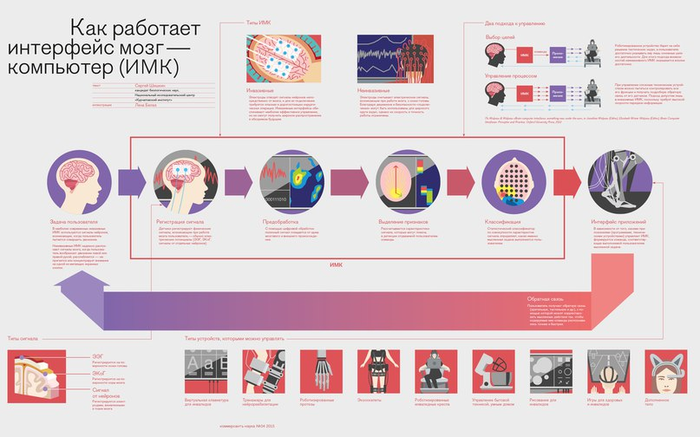
Принцип работы НКИ
На данный момент существует 2 пути реализации работы нейроинтерфейсов: через дешифровку сигналов мозга и через двойную шифрацию сигнала.
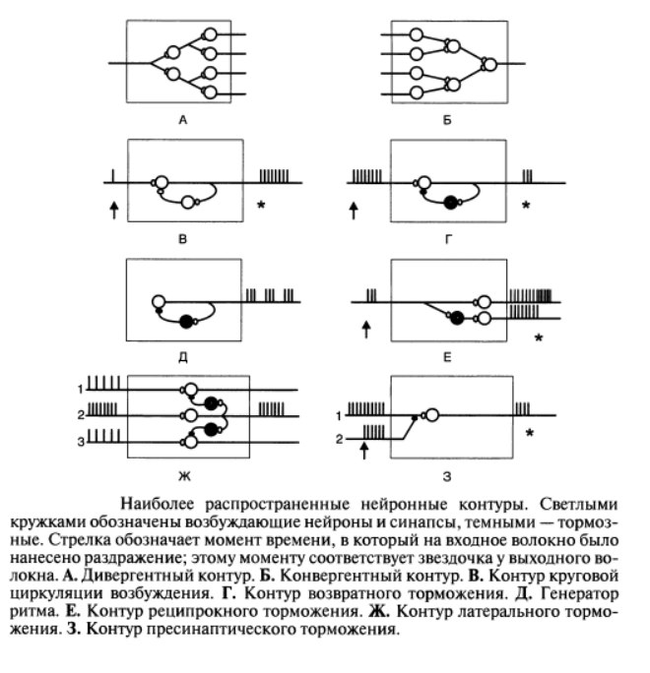
Прямая дешифровка однозначно более перспективный путь, но и многократно сложнее в реализации. На данный момент, несмотря на то что общие принципы работы контуров мозга более-менее изучены, более сложные структуры и их алгоритмы изучены не очень подробно и не пока не известно как можно «загружать» нужную информацию в нужные узлы или же дублировать их электронным аналогом.
Поэтому аналитическая дешифровка и затруднена, хоть и возможна, что можно увидеть в самых современных проектах . Это протезы с ОС, о которых написано выше, усилители памяти, контролеры эмоций и «привязанностей» .

Исследователи из Иллинойского государственного университета создали чип, имплантируемый в мозг, способный автоматически замерять уровень дофамина в организме и давать команду на выработку дополнительной дозы, если уровень находится ниже заданного. Проверенный пока на мышах, имплантат в перспективе может сильно облегчить жизнь людям с заболеваниями, связанными с недостаточной выработкой нейромедиаторов.
Дофамин – это один из нейромедиаторов, веществ, посредством которых осуществляется передача электрического импульса от нервной клетки через синаптическое пространство между нейронами, а также, например, от нейронов к мышечной ткани. Он является одним из химических факторов внутреннего подкрепления и служит важной частью «системы вознаграждения» мозга, поскольку вызывает чувство удовольствия (или удовлетворения), чем влияет на процессы мотивации и обучения.
Ранее считалось, что дофамин является главным химическим веществом, связанным с удовольствием. Однако недавние эксперименты показали, что он участвует в обучении методом проб и ошибок, вырабатываясь, когда ожидание результата оправдывается его наступлением.
Дофамин играет немаловажную роль в обеспечении когнитивной деятельности. Его недостаточность передачи приводит к повышенной инертности. Подобные нарушения – типичные симптомы, например, болезни Паркинсона.
В отличие от аналогов-имплантатов, которые измеряют прохождение нервных сигналов для оценки количества содержания дофамина в организме, новый чип измеряет непосредственно концентрацию химического вещества. Чип работает по принципу термостата, который меряет температуру, и в случае отклонения включает или выключает отопление.
Сейчас пациентам прописывают лекарства, повышающие уровень нейромедиаторов, однако постоянное отслеживание этого уровня и употребление соответствующей дозы связано с определёнными трудностями. Использование автоматики позволит устранить эти проблемы.
Чип использует электрод из углеродного волокна для измерения pH и уровня дофамина. При понижении его уровня ниже критического он отправляет электрический импульс в нужные клетки, стимулируя выработку. Создатели устройства утверждают, что его можно запрограммировать на работу не только с дофамином, но и с другими нейромедиаторами.
Среди проблем, которые необходимо решать – источник питания для чипа и обход трудностей, связанных с отторжением организмом имплантатов, но этот чип уже сейчас может «принудительно» стимулировать мозг на выработку «гормона удовольствия»
Все же несмотря на все трудности некоторыми результатами подобных работ мы можем воспользоваться уже сейчас.
Моделирование работы мозга человека — задача, выполнить которую ученые смогут только в отдаленном будущем (если вообще смогут). Отобразить в цифровой модели все эти миллиарды соединений между нейронами, а также смоделировать обмен информацией пока никому не под силу.Но это касается мозга человека. А вот упрощенную модель мозга простейшего червя-нематоды уже создали. Дело в том, что нематода — очень простой организм, состоящий всего из 900 с лишним клеток. Нервная система червя состоит из 302 нейронов. Взаимодействие между отдельными клетками и системами давно описано, поэтому создать цифровую копию относительно несложно (по сравнению со сложностью моделирования в цифре более сложных организмов). Код, или даже скорее цифровую копию нервной системы, мы можем загрузить в робота, и он будет работать уже на биологических алгоритмах.
ОЦИФРОВАННАЯ НЕМАТОДА

Удивительно, но без всяких дополнительных инструкций робот сможет самостоятельно передвигаться, причем поведенческие паттерны робота схожи с аналогичными паттернами обычного червя. Предположительно в перспективе можно будет оцифровать и что-то более сложное и также просто загрузить в нужное шасси.
При двойной шифрации, которую в основном и используют, не пытаются определить что именно значат каждый сигнал, а просто, собирая статистику таких сигналов, выделяют его и маркируют под определенную задачу. Такие интерфейсы наиболее хорошо отработаны, повторяемы в реализации и относительно распространены.
Технологии таких интерфейсов настолько хорошо развились что уже доступны для репликации почти каждому.
Спасибо за внимание. Не забываем подписываться на сообщество.