Исследователи из Университета Дьюка (США) сделали то, что до сих пор, казалось бы, можно было увидеть разве что в фантастическом кино. Они объединили два мозга в один с помощью радиопередатчика, который транслировал нервные импульсы одной крысы в мозг другой, и в итоге второе животное как бы смотрело на мир глазами первого.
Работа выполнялась под руководством Мигеля Николелиса (о котором мы недавно вспоминали в связи с перспективами научно-технического прогресса). Г-н Николелис — известнейший нейробиолог, занимающийся преимущественно взаимодействиями между живым мозгом и электронными устройствами. В частности, он и его группа недавно сумели создать нейроипмлантат, позволяюший обезьяне двигать механической рукой и, более того, получать от этой руки какие-то тактильные ощущения. Собственно, следующее, что сделали исследователи, — просто заменили механическую руку на живой организм.
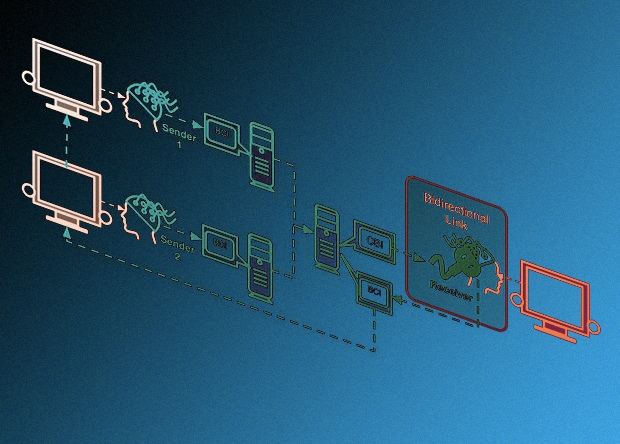
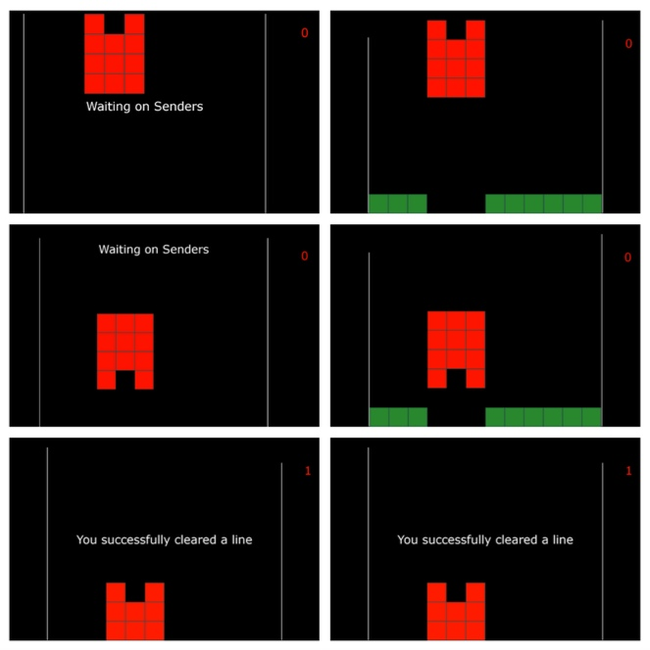
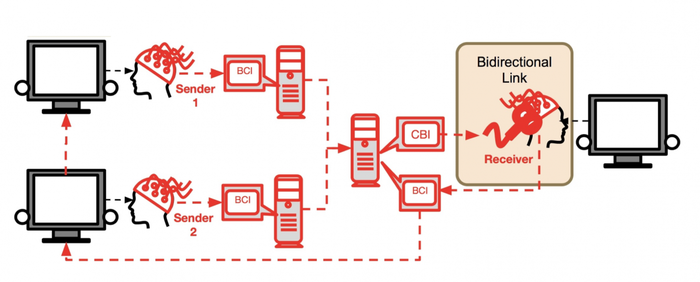
Одну из крыс (назовём её «передатчиком») учили нажимать на один из двух рычагов. Нейроимплантат записывал активность моторной коры, сравнивал с предыдущими сеансами активности и преобразовывал в более простой сигнал, который представлял информацию о рычаге и побуждающий импульс, чтобы на этот рычаг нажать. Этот преобразованный сигнал поступал в мозг другой крысе (пусть это будет «приёмник»), которая, не видя и не общаясь с первым животным, нажимала на собственный рычаг и получала награду. «Приёмник» правильно нажимал на рычаг в 64% случаев, что далеко от совершенства, но при этом значительно отличается от простого совпадения.
Похожие результаты получились, когда имплантаты вживляли в соматосенсорную кору, отвечающую за тактильные ощущения от вибриссов. Причём в этом случае передача сигналов осуществлялась буквально между континентами: одна крыса была в США, в лаборатории Университета Дьюка, а вторая — в Бразилии.
В статье, опубликованной в Scientific Reports, авторы описывают ещё один любопытный эффект, продемонстрированный подопытными крысами. Животное-передатчик получало дополнительную награду, если животное-приёмник точно повторяло его действия. В итоге передающая крыса старалась действовать чётче и целенаправленнее, то есть как будто хотела уменьшить нервноимпульсный шум, загрязняющий главные сигналы, которые имеют отношение к рычагу, его нажатию и последующей награде. Скептики, правда, указывают на то, что полученная точность приёма и воспроизведения нервного импульса и соответствующего ему действия слишком невысока — особенно если принять во внимание, что задание было довольно простое. Животным нужно было сделать выбор между всего двумя вариантами, и намного интересней было бы, если б диапазон значений для выбора был шире, например, если бы рычагов было не два, а пять.
Хотя эти эксперименты ставились ради того, чтобы понять, как можно усовершенствовать передачу сигналов между живым мозгом и, к примеру, протезом или гипотетическим «живым компьютером», другие учёные не слишком впечатлены результатами. По их мнению, при всей внешней эффектности работы остаётся не совсем понятным, какой именно цели она может послужить. Слово «Голливуд» более чем часто мелькает в отзывах уважаемых критиков. И то сказать: первое, что приходит в голову в связи с этими «межконтинентальными» крысами, — фильмы о зомби, «пришельцах в твоей голове» и, разумеется, «Аватар». Правда, самих авторов эти возражения и голливудские ассоциации не смущают: по словам Мигеля Николелиса, сейчас они работают над тем, чтобы объединить уже не два мозга, а четыре.