

Xiaomi Mi Band 2 - обзор от жиробаса. Зачем мне мибенд?
Всем привет! Сегодня я расскажу вам о маленьком, но очень обаятельном засранце - Xiaomi Mi Band 2.
Всем привет! Сегодня я расскажу вам о маленьком, но очень обаятельном засранце - Xiaomi Mi Band 2.
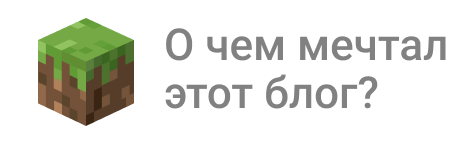
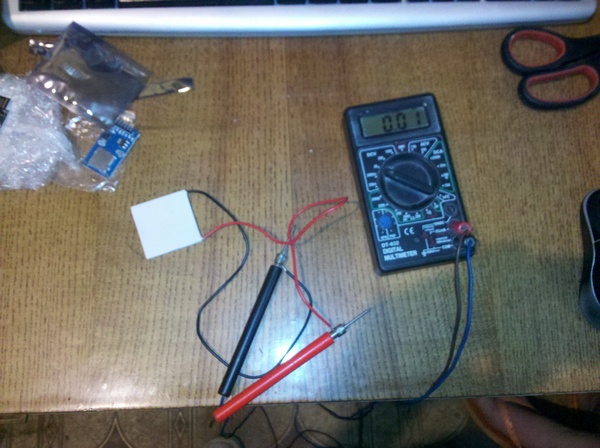
Нашёл я всё таки радиаторы, правда маленькие со старых видяшек. Установил на радиатор с помощью капельки термопасты (соскреб с чипа видяхи, совсем чуть чуть), радиатор с элементом Пельтье установил на кулера, так чтобы воздух снизу заходил и обдувал радиатор. Ну а наверх поставил железную эмалированную кружку с кипятком, только что из чайника, максимальное напряжение которое я получил - 0,89 вольта. Значение маленькое, но всё из за хренового охаждения, и маленького радиатора
Дело в том, что кружка с кипятком имея температуру около 99 градусов Цельсия, отдает это тепло на элемент и он не успевает охладиться. Сторона которая находилась на радиаторе была почти такой же горячей как и та на которой стояла кружка, жаль у меня нет термометра чтобы измерить реальную температуру.
Далее я подключил нагрузку, в виде моторчика, снова вскипятил воду и залил в кружку, включив перед этим тестер в получившуюся электрическую цепь. Максимум который он выдал - 130 миллиампер. Опять же, хреновое охлаждение, на этот раз я взял старую систему охлаждения с видяхи и направил поток воздуха между гребнями радиатора.


Далее был тест с подачей питания на элемент Пельтье. Подавал 7,4 вольта с аккумулятора от радиоуправляемого вертолётика. Одна сторона очень сильно прогрелась, но снизу со всей дури дул кулер пытаясь это всё охладить, а с верху буквально за 30-50 секунд образовался не хилый такой конденсат и плюс был довольно холодным. Я ждал минут десять он не замёрз, потом были попытки теста с аккумулятором литий полимерным от квадрика на 11,1 вольта и ёмкостью 5000 миллиампер (40С).

Сначала одна сторона резко охладилась, сильнее чем при тестах на 7.4 вольта, но потом начала нагреваться, так как обратная сторона тоже так не хило нагрелась, а радиатор от видяхи и кулер от старого ПэКа не справлялись с её охлаждением. Так как эти элементы в середине имеют полупроводники, которые припаяны легкоплавким припоем (который плавиться при температуре около 125 градусов Цельсия) то я решил дальше (читай дольше) не тестировать при 11,1 вольтах, от греха подальше. А подождать нормального процессорного радиатора и сделать ещё один тест.
2 - Для нормального походного холодильника - не подойдут
3 - Нужен большой радиатор, что при его размерах и отдачи не оправданно
Плюсы:
1 - Маленькие размеры - 4х4 сантиметра
2 - Отлично подойдёт для изготовления самодельного кулера воды (в офисах такие стоят)
3 - Отлично подойдёт как аварийный генератор в связке с платой от аварийного "павербанка" на пальчиковых батареях, так как он может выдавать до 1.5 вольта, а они как раз и работают от 15 вольтовых батареек, телефон заряжать конечно долго будет, но экстренный звонок совершить сможете.
4 - Подходит для замены вышедших элементов в кондиционерах автомобилей
5 - Низкая цена
6 - идеально подходит для создания мини холодильника для газировок (незаменимая вещь в душных офисах)
Характеристики:
Модель TEC1-12706
Наличие герметизации Да
Рабочее напряжение, Вольт (V) от 3.7 до 12
Максимальное напряжение, Вольт (V) 15,4 (есть шанс вывести из строя)
Рабочий ток, Ампер (A) 6
Мощность, Ватт (W) 53.3
Максимальная мощность охлаждения, Ватт (W) 53
Рабочая температура, градусов Цельсия <60C
Максимальная рабочая температура, градусов Цельсия <80C
Размеры, мм 40x40x4
Длинна проводов, мм 300
Ко-во термопар 127
Цвет Белый
Вообще советую для приобретения в целях экспериментов, если хотите соорудить что нибудь серьёзно сначала закажите и поработайте с этим элементом.
кому интересно - покупал у этого продавца
Заказал я на Алиэкспрес себе 6 ништяков:
1 шт. Модуль MicroSD для Arduino за $ 0.57
1 шт. Arduino Nano v3 за $ 2.10
1 шт. Digispark ATTINY85 за $ 1.73
3 шт. Элемент Пельтье TEC1-12706 по $ 1.52 шт.
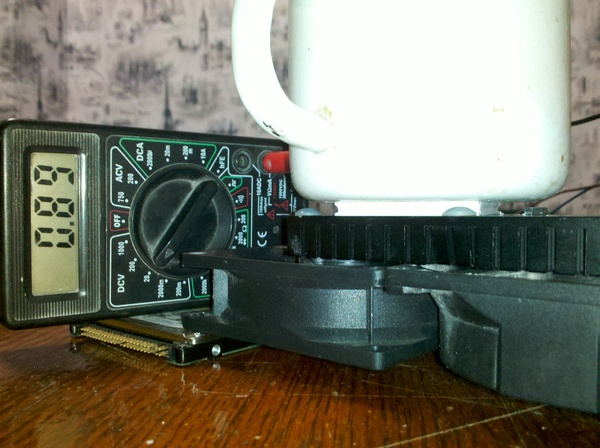
Из Китая в Украину прилетело за 7 дней с момента оформления покупки, но дальше работала наша таможня и почта в итоге получил через 21 день с момента оформления покупки.
Упаковано хорошо, коробка не помялась, элементы Пельтье были хорошо упакованы в пупырку.

Вот они, ништячки)

Модуль MicroSD для Arduino - хорошего качества нет не смытого флюса на плате, что однозначно плюс продавцу.


Arduino Nano v3 упакована в антистатический пакет, опять же следов флюса нету. Пайка хорошая, огрехов не заметил.
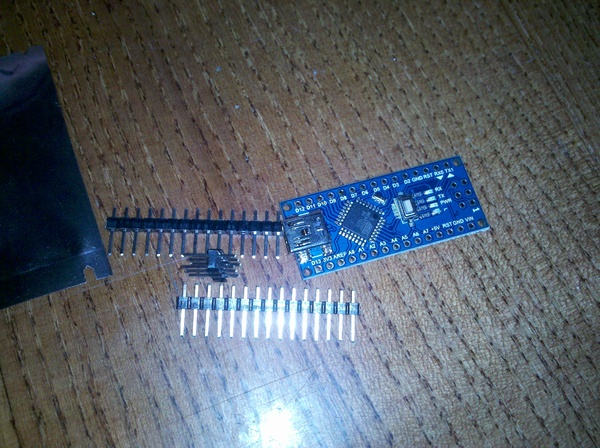
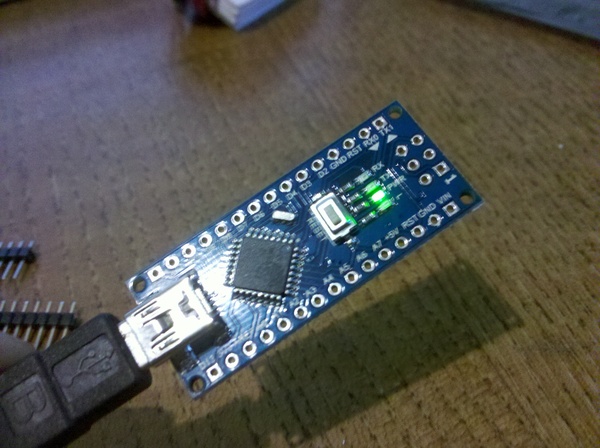
Подключил к ПК - всё работает. Это очень хорошо. а то есть много идей а проектировать не было на чём, все мои ништяки во время перезда куда то исчезли. Теперь же я скоро заделаю одну интересную вещицу для Вас)
Давно хотел попробовать Digispark ATTINY85, вот и заказал себе, говорят отличная вещь. Ну что ж попробуем)
Опять же упаковка Антистатик, следов флюса нет, пайка качественная
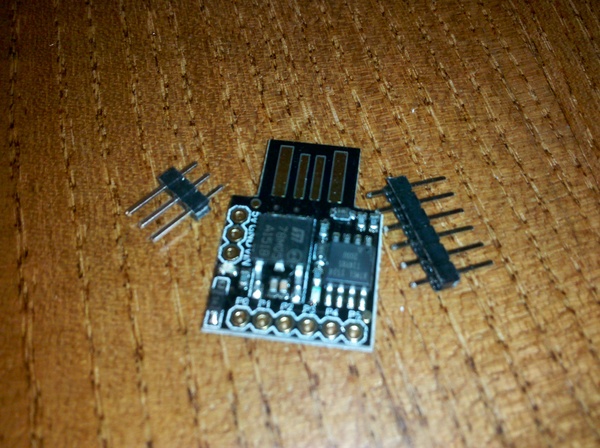
Шелкография отличная
Вставил и работает) очень рад что не пришло бракованным (был опыт и такого)
Как я писал немного выше, давно хотел я попробовать себя в Атини, друзья подписчики что посоветуете попробовать для начала?) вашт предложения оставляйте в коментах, буду ждать))
И самый крутой (для меня) и долгожданный ништяк - Элементы Пельтье, давно посматривал на них, хочу попробовать сделать зарядник а также холодильник небольшой)

Я ожидал что они побольше будут, ну да ладно) и так нормально будет

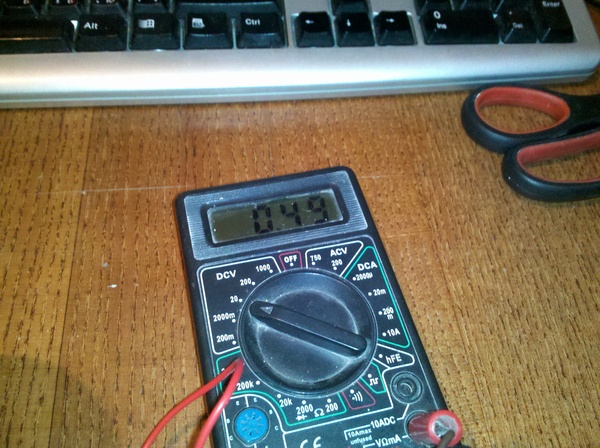
Напряжение в спокойствии
Так как я где то прое потерял радиаторы от процессоров и видях, которых у меня было очень много (ненавижу переезды) то тест проводил без охлаждения

В таких спартанских условиях он выдает 0.49~0.51 Вольт
Где же эти чёртовые радиаторы когда они так нужны? :(

Итог:
Продавец - хороший, советую. отправил быстро, упаковал качественно, трек номер присутствовал но трекался только до прибитая в Киев.
Укр. Почта и таможня - работают как слоупоки, почему из Китая в Киев оно добралось за семь дней, а тут по стране, мля намного дольше. Одни расстройства с этой нашей "БЛИЦ" почтой.
Товар качественный, работает, нареканий нет, а то я один раз заказал прошлым летом ардуинок, так они мало того что все в флюсе были, так и пайка хреновая, сопли и тд и текстолит дешёвый очень.
Будьте внимательны при перездах, а то прое%Ёте как я, много чего.
Знаю что в таких случая у меня просят ссылки :
Модуль MicroSD для Arduino за $ 0.57
Элемент Пельтье TEC1-12706 по $ 1.52 шт.
p.s. ссылки не реферальные
Приветствую тебя, дорогой друг, ты как и каждый начинающий радиолюбитель, наверное, задавался этим вопросом. Зачем все эти петли, завитушки, зигзаги на печатных платах электронных устройств? Когда можно же было провести дорожку от пункта «А» в пункт «Б» намного короче. Для чего их гнут проектировщики-инженеры? Ведь казалось бы только усложняют себе работу или нет?
И всё же, зачем их гнут?
А знаешь ли Ты, юный падаван, что скорость электрического сигнала (в идеальных условиях) равна скорости света? Быстрее на данный момент вроде как и нет ничего (учёные еще не открыли объектов или элементарных частиц которые могли бы двигаться выше этой скорости)
Представь себе эту скорость! Всего лишь за секунду электрический сигнал проходит расстояние в 299 792 458 метров! И это вроде как почти что до Луны о_0, во как.
Ну хорошо, а при чём же тогда здесь наши, масинькие, малюсенькие медные (и не только) дорожки на текстолитах (опьять же, и не только) ? — спросишь ты, и это будет чертовски правильный и отличный вопрос!
Давай ка, юный падаван, взглянем на картинку ниже, на ней изображены уровни шины передачи данных, такую шину ты можешь встретить на микроконтроллерах, программаторах, Ардуинах и им подобных платках она зовётся шина SPI :
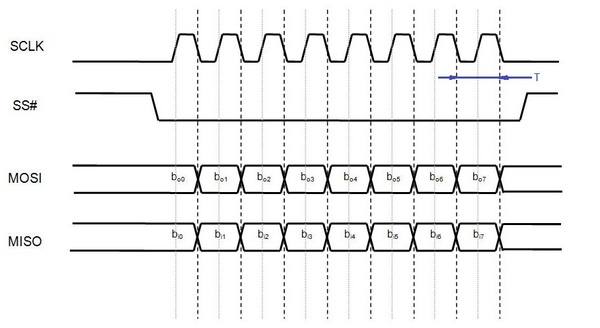
На картинке период одного цикла тактового сигнала обозначен буквой Т. Давай ка расчехли свой, кхм, калькулятор и посчитаем какая же длинна будет у нашего такта? Мы знаем скорость шины, что есть её частота — например 1 мегагерц.
Для этого нам, нужно поделить одну величину на вторую, а именно скорость электрического сигнала на скорость (частоту) шины. 1 мегагерц это 1 000 000 колебаний (обрываний, тактов и тд. согласно википедии)
С.Э.С. / С.Ш. = длинна такта
299 792 458 м / 1 000 000 раз = 299,79 метра.
С такой длинный такта, нам пока нечего бояться и можно спокойно говнокодить делать свои платы без зигзагов и точных расчётов, но с ростом частоты уже стоит задуматься. Возьмём для примера частоту в 2 гигагерца и сделав расчёты узнаём что длинна нашего такта, в данном случае будет всего 15! сантиметров, вот тут уже не разгуляешься.
Вот развели мы плату и длина тактовой дорожки получилась — всего то каких то 4 сантиметра, а длина дорожки по которой бегут данные — 20 сантиметров. И вот тут беда, о юный падаван, потому как на первой дорожке (4см) закончиться первый такт, на второй дорожке (20см) сигнал пыхтя ещё бежит, он в пути.

В данном примере, в первом бите мы отправили 1. Тактовая дорожка отработала цикл и начался уже второй бит. На дорожке данных при этом единичка ещё не дошла. Если данные опознаются при восходящем фронте (т. е. при переходе тактового сигнала с 0 в 1), то второй бит тоже получается = 0, так как 1 от первого бита ещё не дошла и на конце дорожки 0. Мы свою единичку увидим только в третьем бите! Если данные опознаются при ниспадающем фронте тактового сигнала, то мы увидим во втором бите единичку от первого бита.
1 - Для опознания данных при восходящем фронте тактового сигнала, длина дорожки данных должна быть той же длины или короче максимум на полпериода тактового сигнала.
2 - для опознания данных при нисходящем фронте тактового сигнала, длина дорожки данных должна быть той же длины или длиннее максимум на полпериода тактового сигнала.
Допуск в полпериода взят условно, так как в нём ещё нужно учесть скорость работы принимающей микросхемы. Т. е. допуск получается реально меньше.
Допуск (или верхний или нижний) = 299 792 458 / (2 * Частота_тактового_сигнала) — 299 792 458 / скорость_переключения_порта_приёмника.
Если дорожка расположена между двумя сплошными проводящими слоями, то получившийся допуск нужно уменьшить вдвое (для текстолита).
Иногда в спецификациях явно указывают допуск на разницу в длине дорожек.
Надеюсь тебе, юный падаван, было интересно и ты запомнишь это и твои DIY устройства будут работать намного чаще удачно и правильно.
Пост с демонстрацией возможностей станка: http://pikabu.ru/story/sobrali_myi_s_parnyami_frezernyiy_sta...
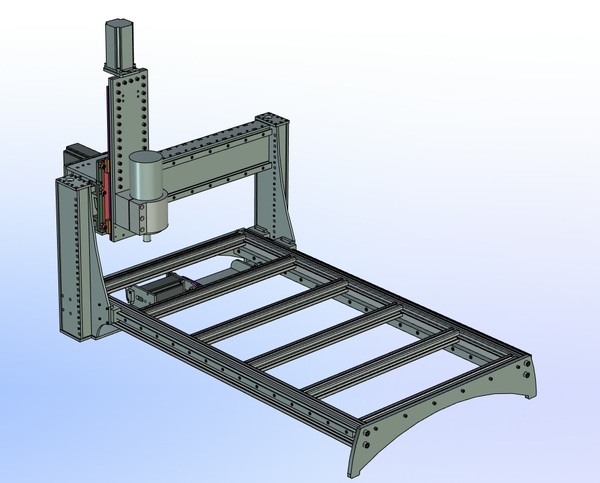
Для начала объявляется благодарность парням с cnc-club.ru, которые как могли критиковали проект во время разработки, поэтому от многих заведомо хреновых схем и решений мы отказались.
Модель в формате step: https://vk.com/doc4906794_437762428
Файлов чертежей 1:1 для лазерной резки не прилагаю, потому как всё равно, никто не станет пилить такой станок как он есть в модели, у всех разные комплектующие.
Для начала пара слов о схеме станка. Первоначально планировалось что портал не будет представлять из себя замкнутый контур, и на каждой ноге будет стоять по двигателю. От этой схемы отказались потому что на такой станок два двигателя на ось больно жирно. Однако, ставить зубчатую рейку только с одной стороны портала крайне не рекомендуется - это жоско ограничит ускорения по этой оси - перекосы портала будут вызывать заклинивания и пропуски.
Недостатки которые требуется устранить:
1)в данной модели использован алюминиевый профиль с пурелоджика, 30х60. Он ровный, но без доработок максимальный прогиб под собственным весом составляет у него 15 сотых миллиметра. Анализ модели это подтверждает. Чтобы исправить это мы ввели стальные пластины 80х6 мм и перепялки из уголков для противостояния кручению.
Для действительно крутого станка эти профиля надо заменить балками набранными из 10мм листовой стали, нарезанной в лазерной резке.
Сразу возникает проблема - для рельс нужна идеально ровная база, так что после сварки эти балки надо отдать на завод, где им сделают две параллельных или перпендикулярных(в зависимости от подробностей, которые я укажу дальше) поверхности с отклонением в две-три сотых, а лучше меньше, или освоить шабер, всякие прикольные методики измерений, и сделать ровные поверхности своими ручками. Предупреждаю, что это смертельно долго, плоскошлифовальный станок справится с этой задачей намного быстрее и лучше. Зато после этой процедуры ваш станок(если отнестись со вниманием к прочим мелочам), сможет пилить детальки для космических ракет с очень крутыми допусками.
2)в модели использованы рельсы и каретки хивин с пурелоджика, и на z неизвестной марки рельсы и каретки с алиэкспресс - они меньшего размера.
При моделировании я настоятельно рекомендую ВСЕ параметры и настройки станка продумать заранее, чтобы любая калибровка производилась регулировочными винтами, и уж в самом крайнем случае - подкладками, но схему выбрать такую, чтобы подкладки не вызывали перекоса и напряжений в каретках.
Настройка перпендикулярности осей x и y обеспечивается прокладками из алюминия толщиной 0.2-0.55мм, установленных между каретками и порталом(это плохой и долгий в настройке вариант, хоть и облегчает конструкцию)
Лучше всего ввести в конструкцию стальные же пластины и регулировочные винты(по 4 на каждую каретку, чтобы гарантированно исключать перекос). Конкретных чертежей и моделей не прилагаю, так как не разрабатывал их.
3)рельсы лучше всего перенести на нижнюю плоскость балки, так на них будет попадать меньше пыли.
4)в моей конструкции установка направления рельс оси z по нормали к столу происходит опять же с помощью подкладок(отгул в плоскости параллельной длинной оси станка Х), и на увеличенных крепёжных отверстиях 12ти винтов которые крепят пластины, на которых базируются каретки оси Z в плоскости параллельной короткой оси Y.
Я и так сломал всю голову, разрабатывая всю конструкцию, но уверен, если посидеть подольше, можно придумать вариант с регулировочными винтами.
5)отверстия под винты кареток длинной оси Х в портале слишком маленькие, надо увеличить на 1мм.
6)удалить все винты скрепляющие портал(это для маньяков), и использовать точечную сварку в райне шипов. Для этого шипы можно сразу на чертежах для резки задать с фасками.
7)все отверстия под резьбу выполняемые методом лазерной резки надо сократить раза в два, и рассверливать их сверлом нужного диаметра, то даст нормальную не ухуйканную резьбу, стыдно сказать, но что это актуальная фишка я понял только собирая станок, всё-таки при толщине металла 6 мм рез недостаточно чистый чтобы прямо по нему нарезать резьбу.
Если всё же найдётся халтурщик, который захочет резать по пропиленному лазером отверстию, потрудитесь дать напас 0.1 мм по радиусу на толщину реза...
8)портал однозначно надо делать выше, для установки поворотной головы отчётливо не хватает 150-200мм.
Отсюда вытекает потребность в его облегчении.
Рекомендую вырезать лазером объёмную конструкцию из двух ажурных листов, скреплённых стальными "галками" на сварке, которые дадут множественные треугольники, да и саму перфорацию балок организовать треугольниками, не забыв прогнать через статический анализ, например в сравнении с моей моделью, которую по параметру жёсткости портала можно принять за эталон.
Опять же, конструкция которую я описал из перфорированных листов обладает преимуществом. Перфорированные листы, даже из стали 6 мм при сборке даже имея некоторую неровность согнутся под воздействием прикрученных к ним рельс(а рельсы вам пришлют прямые, скорее всего), и при дальнейшей сборке со сваркой конструкция приобретёт жёсткость, но её не поведёт, если использовать точечную сварку в малых дозах, и отслеживать все возможные напряжения, которые могут исказить конструкцию при тепловой усадке сварных соединений, своевременно ликвидируя зазоры, используя сварку в нужном месте и в нужное время.
Кстати, рекомендуется исключительно сварка mig\mag, никаких электродов, и осваивать сварку придётся самим.
9)также обращаю внимание, что в станке используется держатель шпинделя на 60, тогда как более распространены шпиндели на 80, но вы же всё равно построите модель заново руководствуясь моим опытом, значит будете размечать посадочные отверстия с нуля в соответствии с выбранными заводскими комплектующими.
10)Категорически рекомендую посадить держатель шпинделя на штифты(достаточно двух), чтобы снятие держателя и установка его на место при необходимости, не влекла за собой калибровку оси Z, и вообще, применяйте штифты везде, где надо точно соблюдать взаимное расположение деталей - резьба такого точного расположения не обеспечит.
11)редукторы и привод.
Ось х приводится в действие одним шаговиком, который передаёт момент через редуктор на две шестерни, расположенные по бокам портала.
От центрального подшипника на ведомой оси Х мы пока отказались, но в оси Х присутствует люфт 0.05мм, с причинами которого я ещё не разобрался, вероятнее всего один ремень слабоват для этой оси, но есть мнение что отсутствие указанного подшипника может провоцировать определённую долю этого люфта.
В linuxcnc я внёс значение этого люфта,станок работает компенсируя его, делал сегодня диски для фрезера из гетинакса, которые стали друг в друга с допуском порядка пяти сотых по диаметру, и встают они одинаково плотно как ни поверни, т.е. круг станок изготавливает с достаточной степенью точности.
Чтобы было понятно о чём речь, вот картиночка из интернетов(не моё изделие, своё не фоткал ещё):

В каждом приводе станка обязательно должен быть упругий элемент. Величина его упругости и предельная величина отгула по-чесноку должна подбираться из предполагаемых скоростей, коэффициента микрошага, т.е. угла поворота двигателя за один импульс.
Фишка заключается в том, что если не будет достаточного запаса упругости, начнутся пропуски шагов потому что двигатель не будет успевать провернуться на тот угол, при котором шаг завершается, и будет встречать слишком сильную реакцию ответной части привода, и как следствие буде возвращаться в начальную позицию шага, пропуская его.
Слишком же большая упругость будет вызывать заметный люфт в станке, но по опыту зубчатые ремни в половине случаев люфта не вызывают:)
Теперь собственно об упругих элементах.
Я использовал в станке два комплекта зубчатых шкивов и ремней от китайского рубанка rebir(как я узнал в последствии из интернетов), а купил я их просто ткнув в них пальцем на рынке.
Как оказалось, шкивы изготовлены из рук вон плохо. Для рубанка это пофиг, а для станка с чпу - нет. Поэтому дорабатывались они нашим доблестным токарем.
Посадка ведущего шкива на вал двига обеспечена пазом, шпонкой и поксиполом(я ванговал скорый выход из строя, но ничего, пока держится).
Ведомая шестерня посажена на вал с помощью кондуктора из стали с фланцем. На валу фиксируется двумя гужончиками под 120 градусов, к шестерне базируется по цилиндрической поверхности фланца и его плоскости, прикручен тремя винтами сквозь фланец. Внимание, оси под гужончиками надо немного засверлить, чтобы гарантировать несрываемость ведомой шестерни, потому что лично я долго не понимал откуда возникают искажения при исполнении программы, а это гужоны проели бороздки на определённый угол, и проскальзывали на оси на строго фиксированный угол, чем вводили меня в состояние бешенства и непонимания.
Лучший вариант, как обычно - кастом. Взять пару ремней от известного рубанка(или даже три, чтобы два ремня повесить на привод таскающий портал), и у мастеров выточить под них зубчатые шкивы с гужонами, коэффициент редукции у моего станка примерно 3,5, по ощущениям такие двигатели легко потянут 1,5-2, т.е по силе движка в данном случае я ограничения не имею.
12)Кабелеукладчик я сделал из 2 мм полистирола. К сожалению не могу найти чертежи, но его легко разработать с нуля по видео из прошлого поста.
Одно звено имеет порядка 24мм между воображаемыми осями вокруг которых происходит поворот на 30 градусов. Рамка звена имеет шип, который защёлкивается в соответствующее углубление на внешних деталях кабелеукладчика. Это и есть моё ноухау,потому что все кабелеукладчики которые я видел в сети собираются на клею. Здесь же клей не нужен - я напрягаю щёчки, ввожу их в рамку,потом они распрямляются, и разобрать звено можно с трудом, в половине случаев рамка ломается. Учтите что сечения полистирола 2х2мм в рамке не достаточно для цепи которую планируется разбирать и собирать несколько раз.
Отдельный пункт - фрезеровка полистирола. Я делал это исключительно с маслом, т.к. иначе на фрезу налипал материал, и края деталей заплавлялись уходя от нужного допуска бывало даже что и на 0.5 мм. Также надо под это дело изобретать тонкую фрезу,я делал однозубую фрезу 1.7 мм из огрызка сверла по металлу.
13)В моей модели отсутствует столешница, тут рекомендую изголяться кто как может по-максимуму. Самый крутой вариант - стол с Т-пазами, по бокам приспособить бачки для стока сож.
14)для самых изысканных, в хивины можно вкрутить штуцеры, и подавать в них смазку под давлением из шприца или насоса, таким образом возможна организация автоматической системы смазки. Ну нам при нашей небольшой нагрузке хватает раз в месяц впрыснуть смазку из шприца.
Задавайте вопросы, по самым актуальным я запилю отдельный пост, как и отдельный пост про электронику и настройку всего этого дела, конечно тема слишком объёмна даже чтобы уместить её в десятке постов.
...легендарного Стива Возняка(основателя компании Apple).
Всем, кто занимается разработкой электроники - mast read.
Для отображения температуры и влажности на OLED дисплее нам понадобится:
датчик DHT11
Arduino nano
Oled дисплей SSD1306 (SPI, I2C)
Чтобы корректно отображать кириллицу заменяем в библиотеке
Adafruit-GFX файл графики - glcdfont.c на тот, что я вложу в архив
...тем, что им никто не пользуется.


